Sparkling上位机软件
概述
Synria Desk 是一款桌面端机械臂控制软件,支持单臂和双臂两种设备类型的管理与控制。本文档介绍软件的各项功能。
下载地址:
- Windows 版本:下载链接
- macOS 版本:下载链接
⚠️ macOS 用户注意:如果遇到这样的告警情况,在终端运行以下命令解除限制:
sudo xattr -rd com.apple.quarantine /Applications/Synria\ Desk.app

1. 登录与注册
1.1 登录页面
- 微信扫码登录:推荐的登录方式,支持微信扫码快速登录
- 账号密码登录:可展开使用传统账号密码方式登录
- 轮播图展示:左侧展示产品介绍轮播图
1.2 注册页面
- 用户名设置:输入用户名:用户名长度需在 3-16 字符之间
- 手机号绑定:输入手机号码:手机号长度需在 11 位
- 密码设置:设置登录密码:密码长度需在 8-20 字符之间
- 验证码验证:输入短信验证码完成注册:6位数字验证码

1.3忘记密码
- 手机号绑定:输入手机号码:手机号长度需在 11 位
- 验证码验证:输入短信验证码完成注册:6位数字验证码

2. 主页(设备列表)
进入主页后,可看到已添加的设备列表。
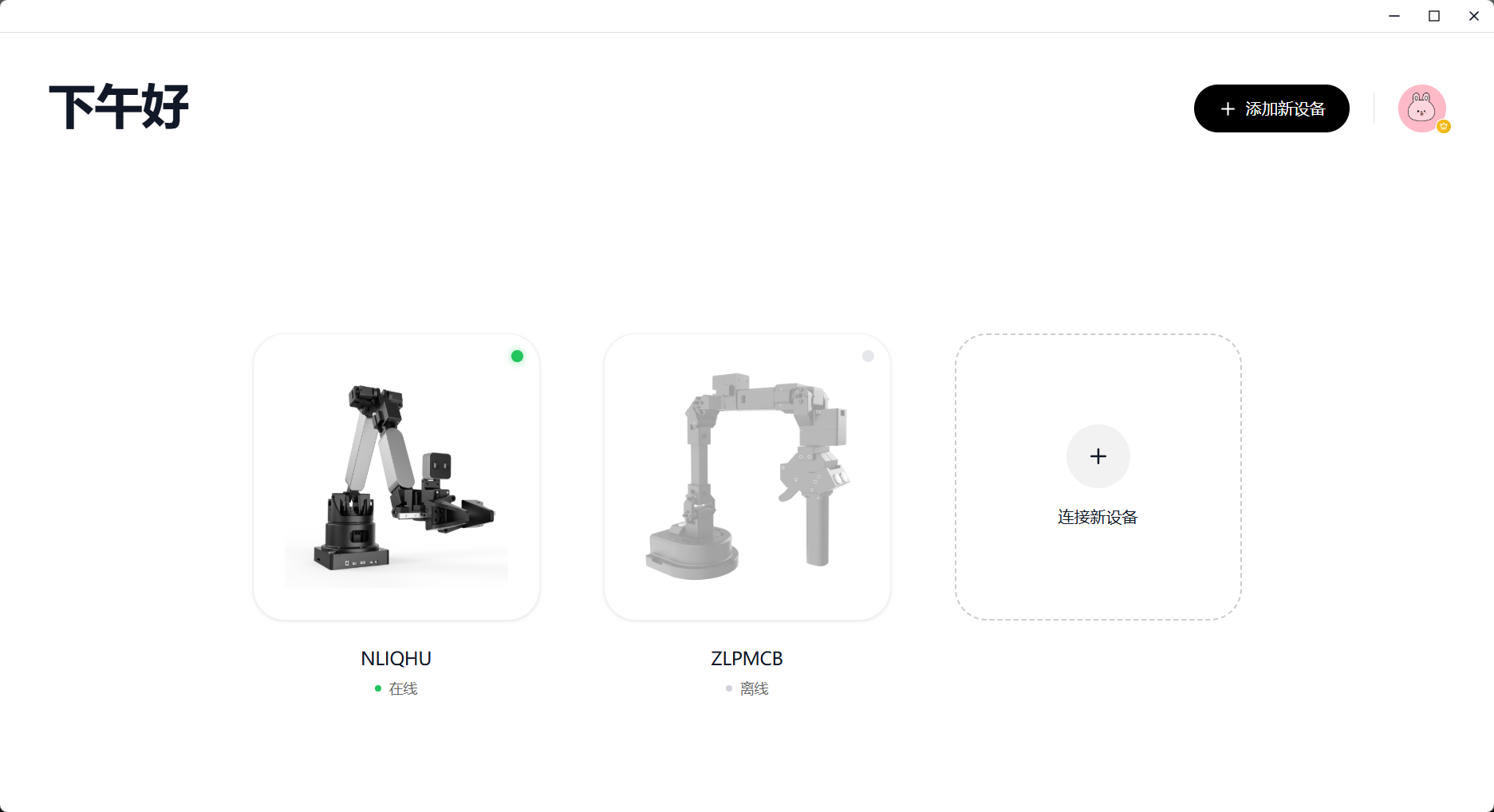
2.1 主要功能
- 设备卡片列表:横向滚动展示所有已添加的设备
- 添加新设备:点击「添加新设备」按钮跳转到添加设备流程
- 个人中心入口:点击头像可进入个人中心页面
- VIP 标识:VIP 用户会显示特殊标识在头像右下角
- 软件更新提示:检测到新版本时弹出更新提示弹窗

2.2 设备卡片
每个设备卡片显示:
- 设备名称
- 设备序列号
- 连接状态(在线 / 离线)
- 点击在线状态的卡片可进入设备详情控制界面
- 可对离线状态的设备进行删除操作
3. 添加设备
3.1 连接流程
- 点击连接/添加按钮可以扫码连接设备
4. 个人中心
4.1 用户信息区域
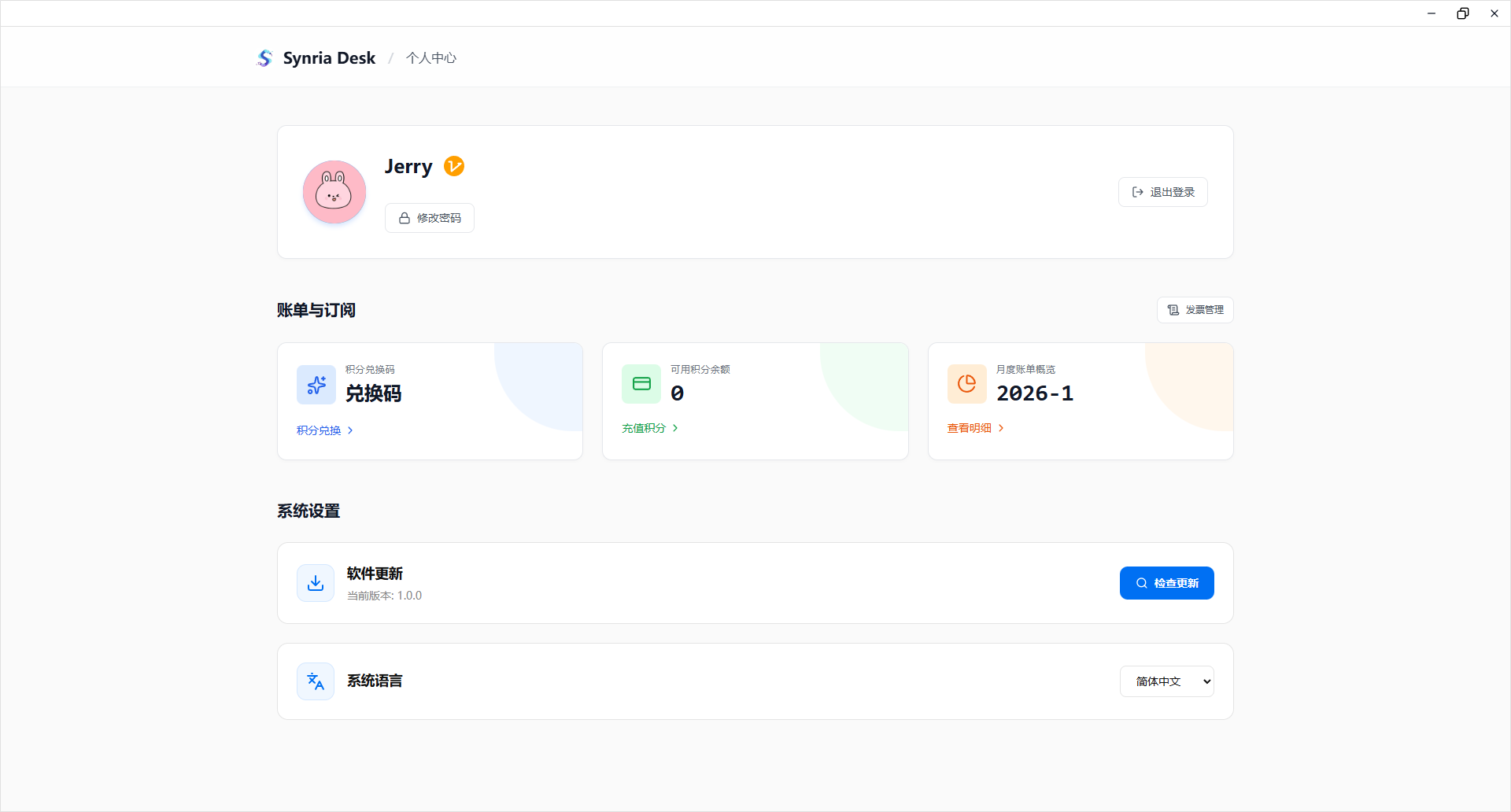
- 头像显示:展示用户头像
- 用户名显示:显示当前登录用户名
- VIP 标识:VIP 用户显示专属标识
- 修改密码:可修改登录密码
- 退出登录:退出当前账号
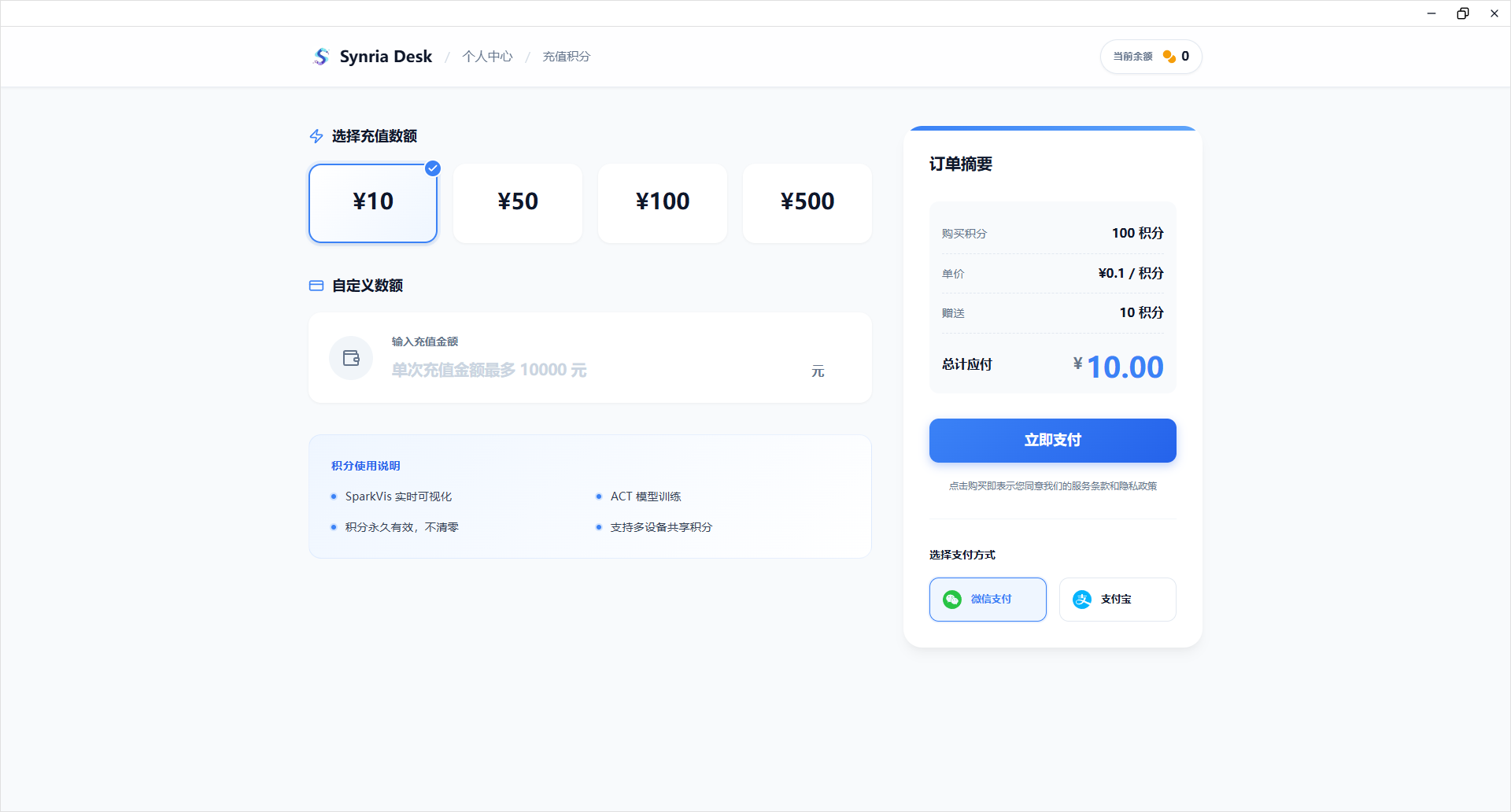
4.2 账单与订阅
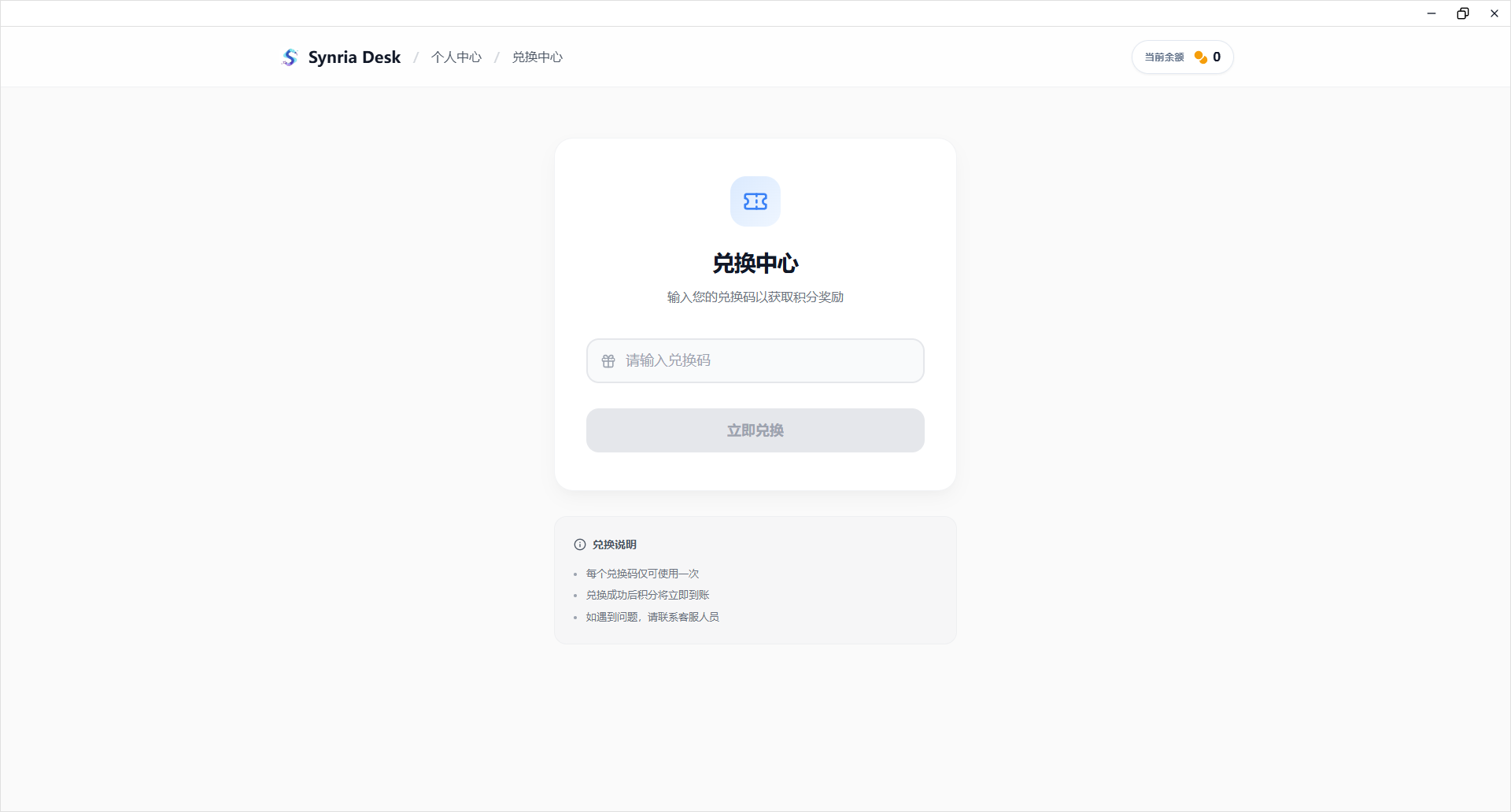
- 兑换码入口:点击可跳转至兑换码页面,输入兑换码获取积分或者VIP
- 积分余额:显示当前积分余额,点击可跳转至充值页面
- 本月用量:展示当月使用情况,点击可查看详细账单
- 发票管理入口:可进入发票管理页面
4.3 子页面
| 页面 | 功能说明 |
|---|---|
| 账单详情 | 查看历史消费记录、发票管理 |
| 购买积分 | 选择充值套餐、完成支付 |
| 兑换码 | 输入兑换码获取积分或者VIP |
| 修改密码 | 安全验证后修改密码 |
| 语言设置 | 切换系统语言(中 / 英文) |
| 版本信息 | 查看软件版本信息 |
5. 单臂控制
进入单臂设备后,侧边栏包含以下功能模块:
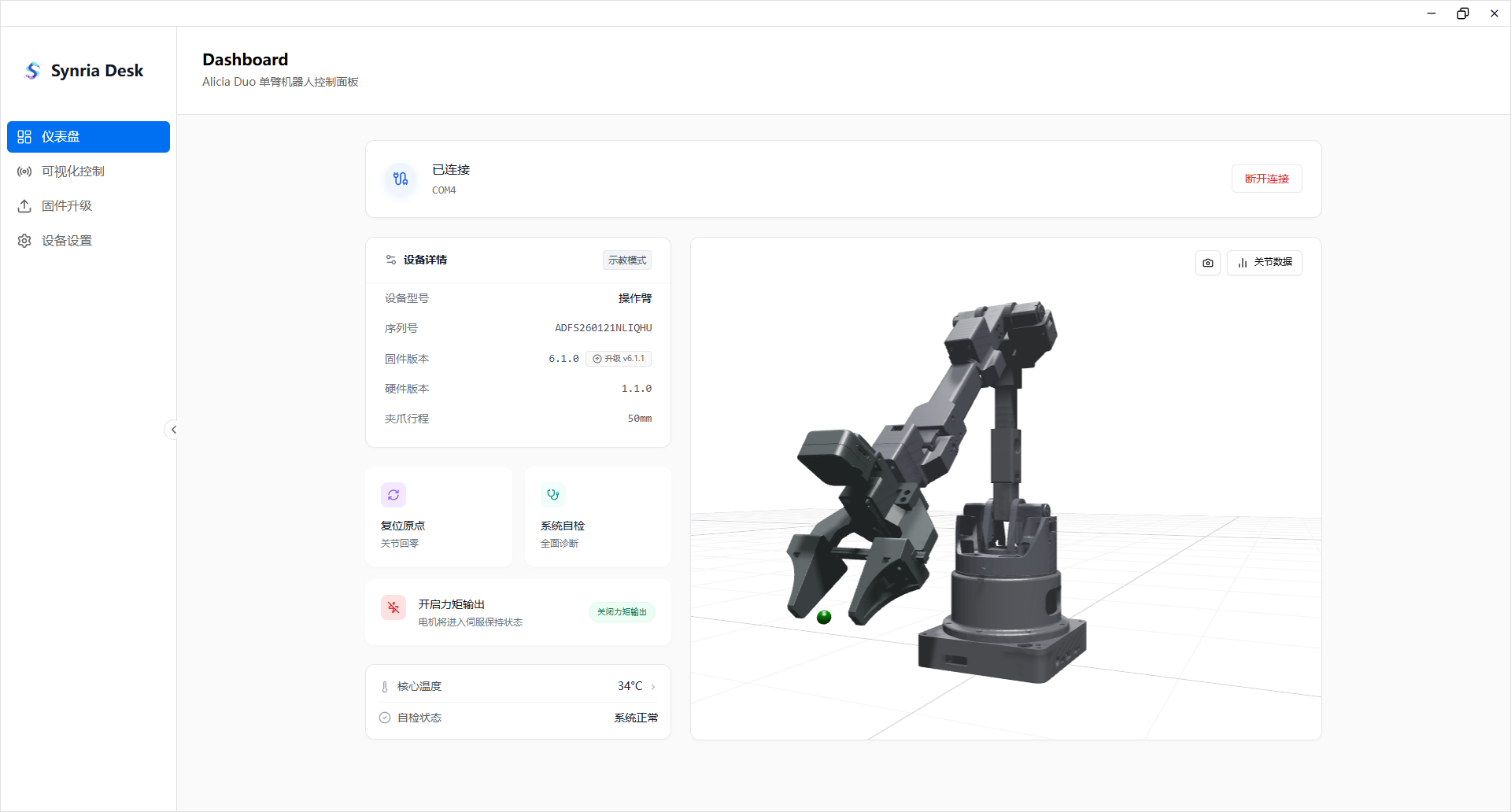
5.1 仪表盘(Dashboard)
连接状态区域:
- 显示设备连接状态图标(已连接 / 未连接)
- 连接 / 断开按钮
设备详情卡片:
- 设备型号
- 序列号
- 固件版本(固件有新版本时,可点击跳转至固件更新页面)
- 硬件版本
- 夹爪行程
快捷操作区域:
- 回归原点:控制机械臂回到初始零点位置
- 系统自检:对设备进行全面诊断检测
- 力矩控制:开启 / 关闭力矩(力矩开关)
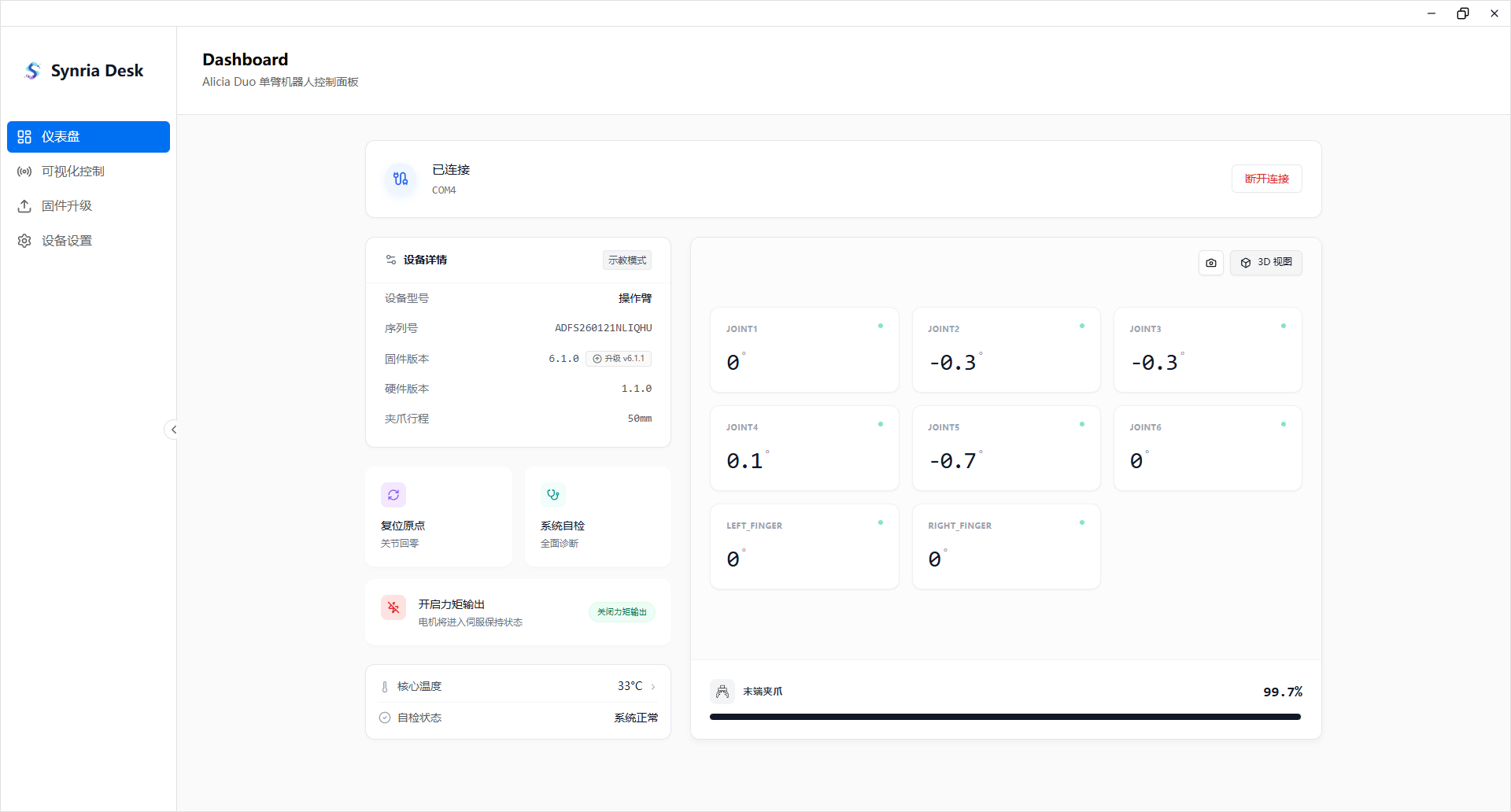
3D 可视化预览:
- 显示机械臂的 3D 模型
- 实时显示各关节角度
- 夹爪开合状态
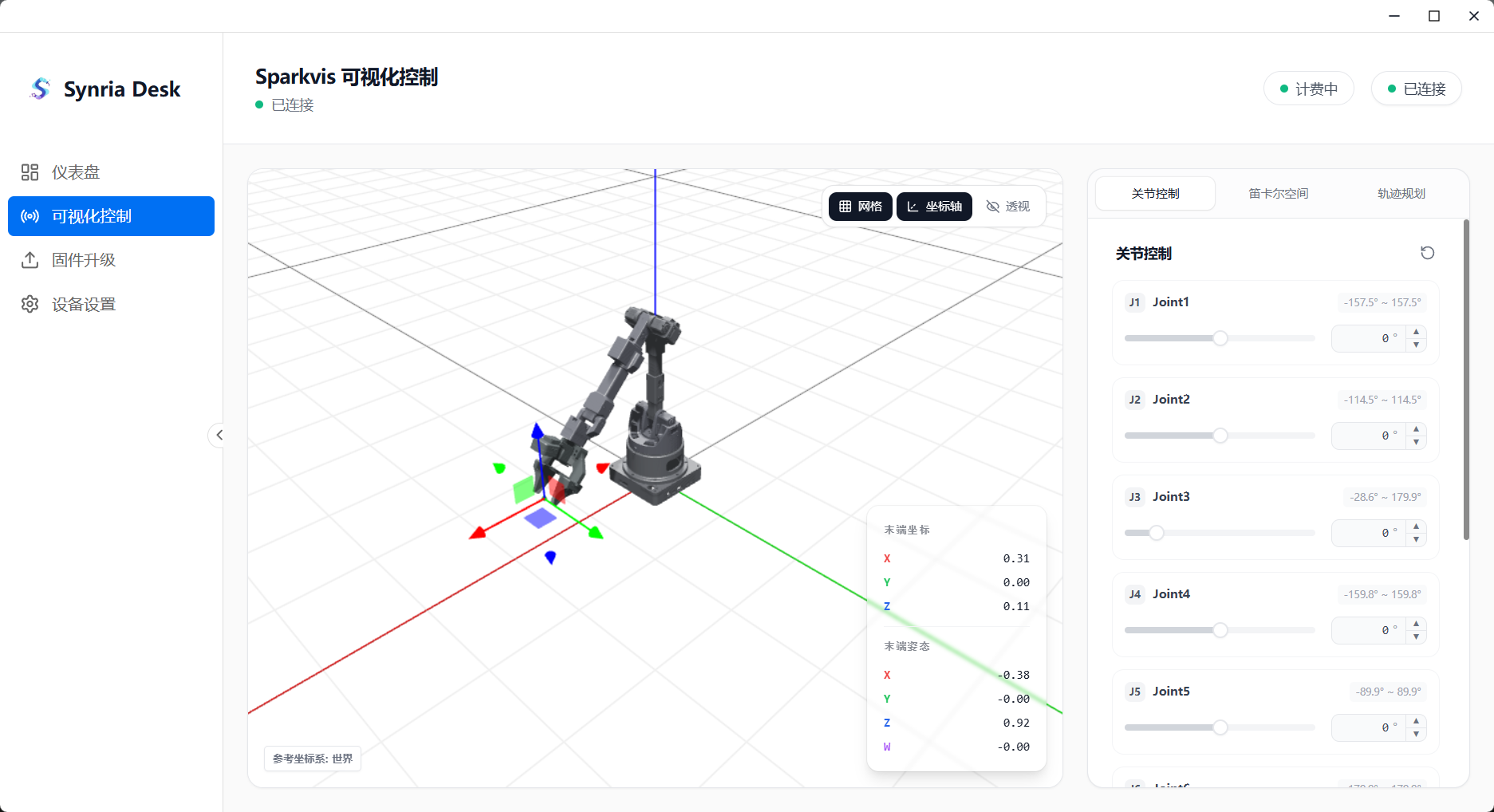
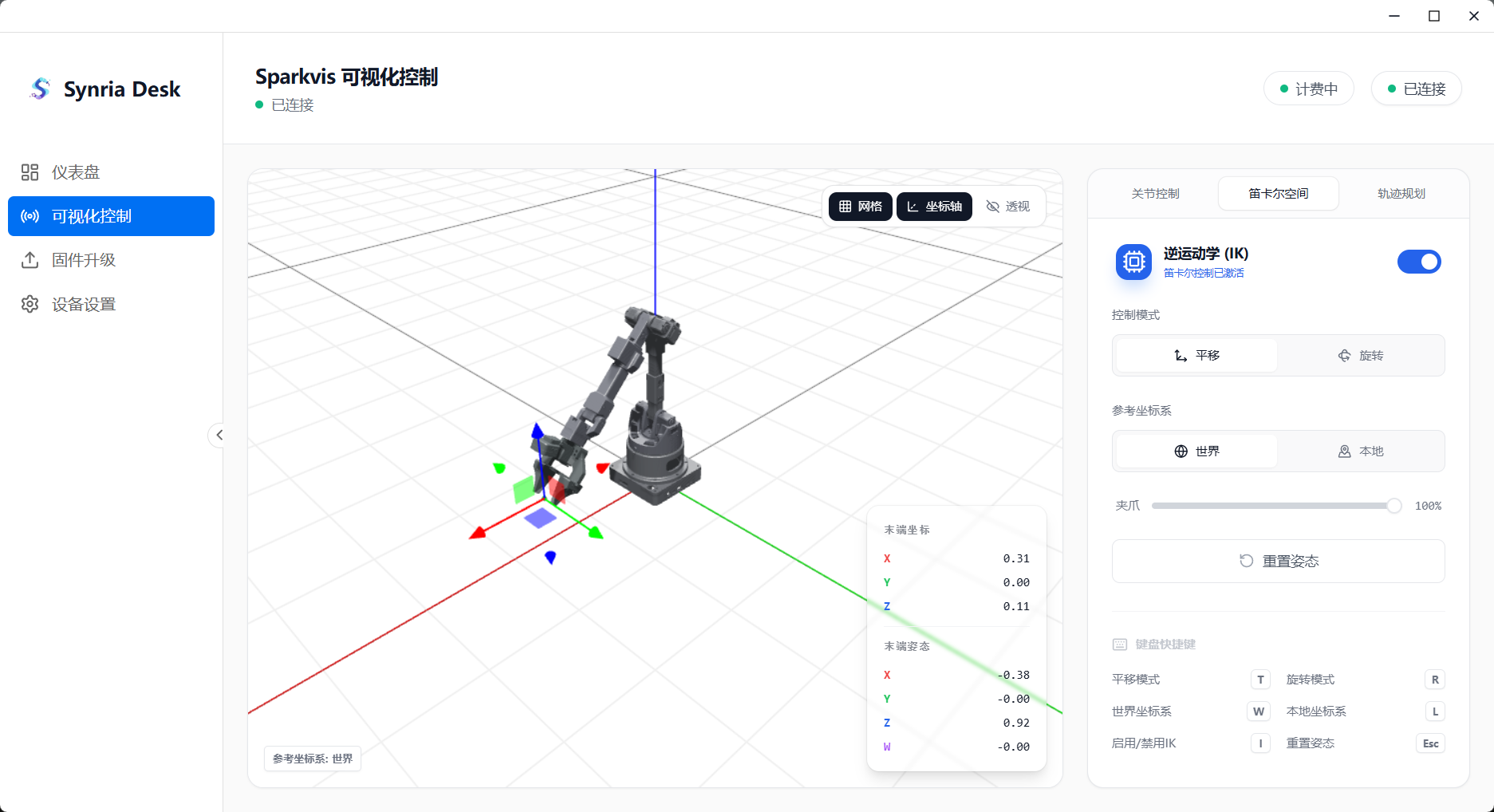
5.2 可视化(Visualize)
状态显示: 可视化控制需要消耗积分,10积分可用1小时
- 连接状态指示(已连接 / 仿真模式)
- 积分消耗状态(计费模式下显示)
工具栏:
- 网格显示开关
- 坐标轴显示开关
- 透明模式开关(透视)
坐标信息:
- 末端坐标:实时显示末端执行器位置 (X, Y, Z)
- 末端姿态:实时显示末端执行器姿态(四元数 X, Y, Z, W)
- 参考坐标系:世界 / 本地
3D 可视化模型:
- 实时显示机械臂姿态
- 可拖动交互控制
控制面板(三个标签页):
关节控制
- 各关节角度滑块控制(J1-J6)
- 夹爪开合控制滑块
笛卡尔空间
- 逆运动学 (IK) 开关:开启后可通过笛卡尔坐标控制末端位置
- 控制模式:平移 / 旋转
- 参考坐标系:世界 / 本地
- 夹爪控制:调整夹爪开合
- 键盘快捷键:
- T:平移模式 / R:旋转模式
- W:世界坐标系 / L:本地坐标系
- I:开启/关闭IK / Esc:重置姿态
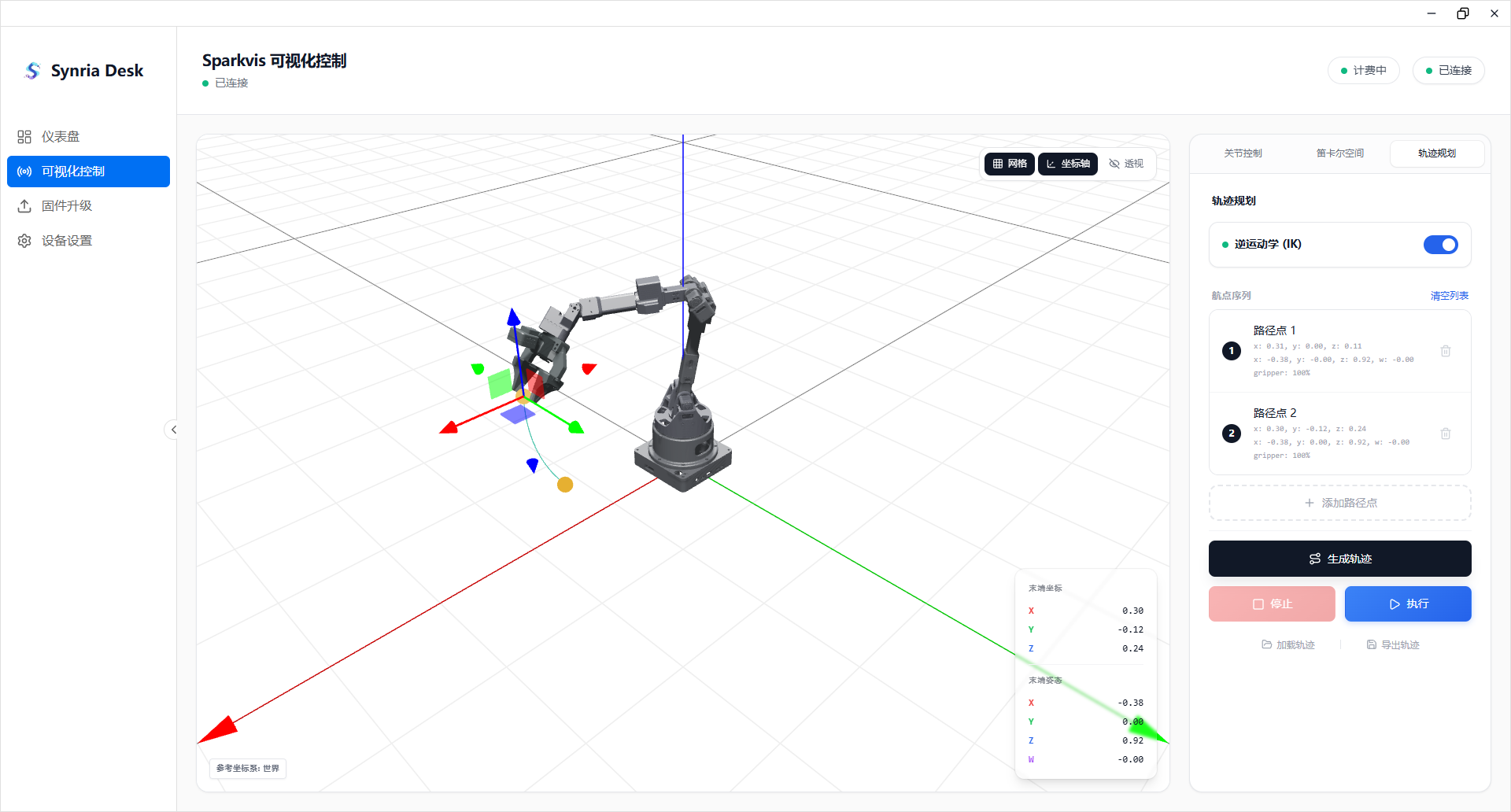
轨迹规划
- 逆运动学 (IK) 开关:开启后可通过笛卡尔坐标控制末端位置
- 控制模式:平移 / 旋转
- 参考坐标系:世界 / 本地
- 关节控制:调整各关节角度
- 重置姿态:恢复到零点姿态
- 添加路径点:在当前位置添加一个轨迹路径点
- 生成轨迹:根据已添加的路径点生成完整运动轨迹
- 轨迹执行:
- 暂停:暂停轨迹执行
- 执行:开始执行轨迹
- 转化轨迹:将轨迹转化为可保存格式 / 加载成可执行模式
5.3 固件升级(Firmware)
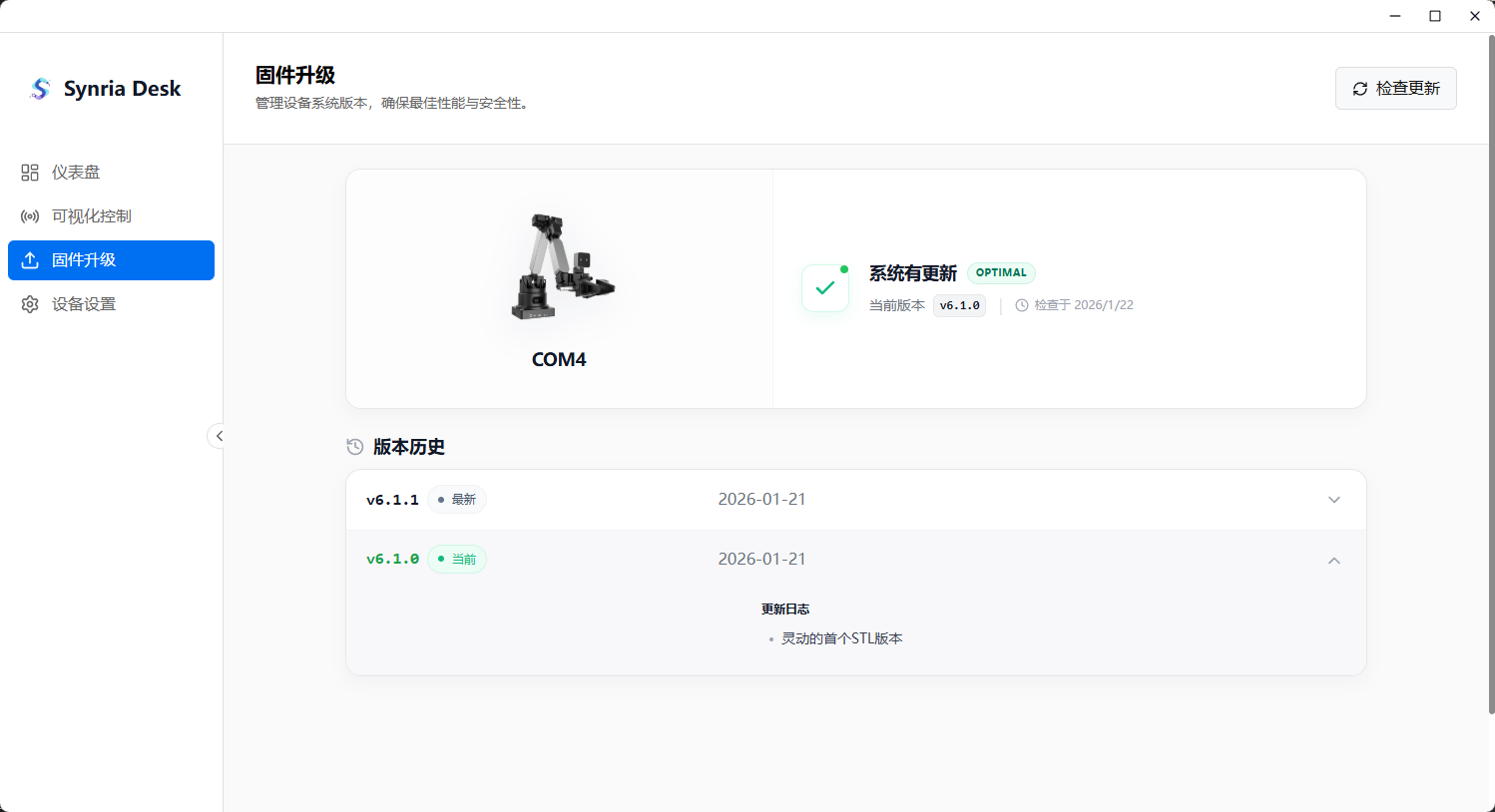
设备信息展示:
- 设备图片
- 设备名称/ID
- 当前固件版本
- 系统状态(已是最新 / 有可用更新)
版本历史列表:
- 展开 / 折叠查看各版本详情
- 版本号、发布日期
- 更新日志(变更说明)
- 升级 / 回滚按钮
更新操作:
- 检查更新按钮
- 升级 / 回滚进行时,请勿断开连接
- 升级 / 回滚成功后,将会重启设备
5.4 设置(Settings)

机器人控制:
- 开启力矩:开启机械臂力矩
- 关闭力矩:关闭机械臂力矩
- 设定零点:将当前位置设为零点(设置零点属于危险操作,请谨慎使用)
运动设置:
- 加速度模式:调整机械臂的响应速度和加速度限制,共有5个档位
- 平稳(30):最柔和的加减速,适合精密操作
- 流畅(50):平滑的运动曲线,适合日常使用
- 平衡(100):速度与稳定性的平衡模式
- 强力(150):较快的响应速度,适合高效作业
- 极速(200):解锁最高加速度和速度,适合对效率要求极高且环境安全可控的场景
- 选择模式后,下方会显示当前模式的详细说明
6. 双臂控制
双臂设备的控制界面结构与单臂类似,但针对双臂特性进行了优化:
6.1 仪表盘(Dashboard)
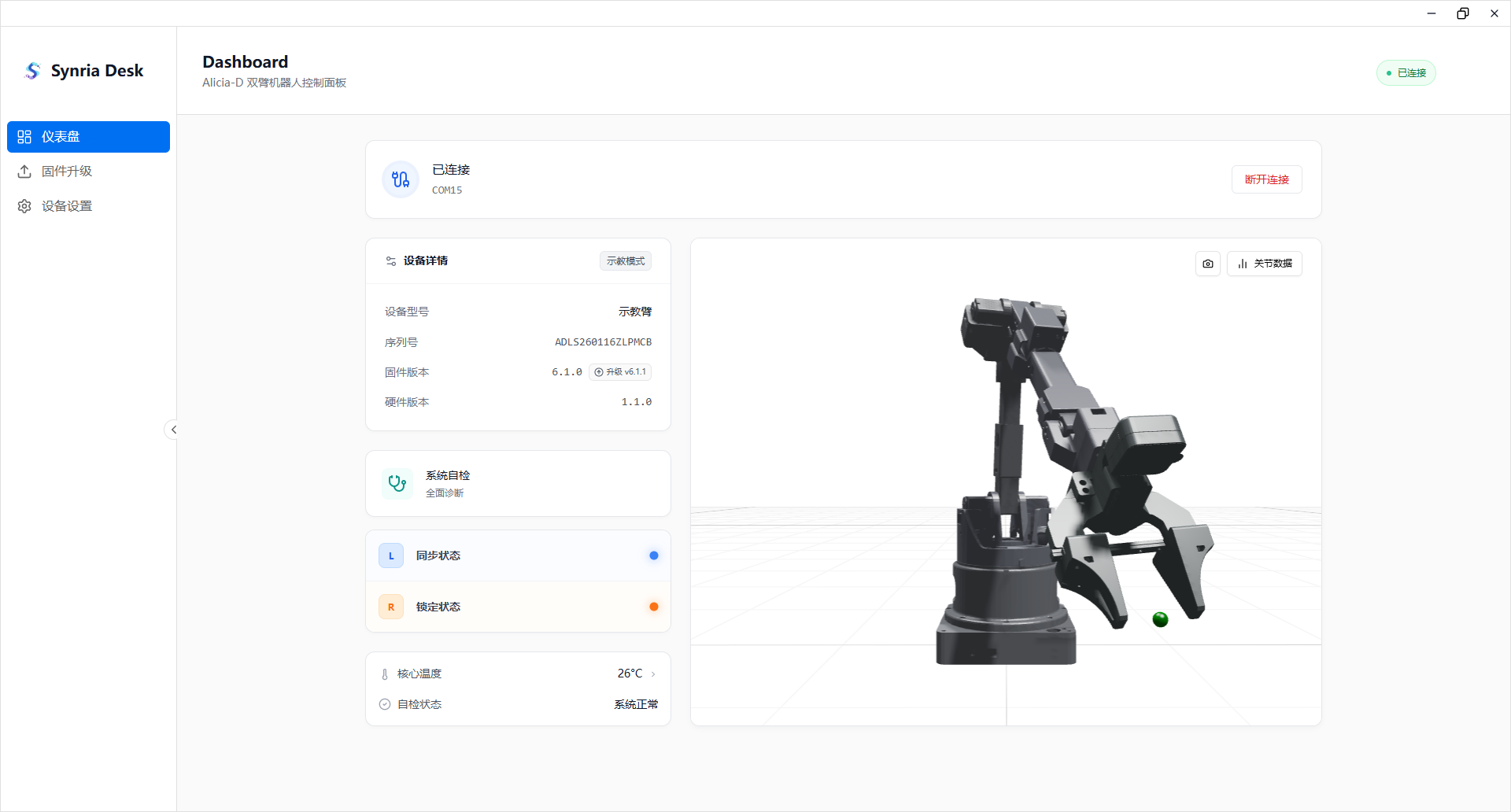
- 双臂连接状态指示
- 连接 / 断开按钮
设备详情:
- 设备型号、序列号
- 固件版本、硬件版本
- 示教模式标识
快捷操作:
- 系统自检:全面诊断检测
- 同步控制:开启 / 关闭双臂同步运动
- 锁定控制:锁定 / 解锁双臂
3D 可视化预览:
- 显示机械臂的 3D 模型
- 实时显示各关节角度
- 夹爪开合状态
6.2 固件升级(Firmware)
与单臂固件更新功能一致:
- 设备信息展示
- 版本历史列表
- 检查更新/升级回滚
6.3 设置(Settings)

机器人控制:
- 设定零点
7. 通用功能
7.1 多语言支持
- 支持中文和英文两种语言
- 可在个人中心设置页面切换语言
7.2 软件自动更新
- 启动时自动检测新版本
- 弹窗提示更新内容
- 支持下载更新并后台静默安装
7.3 消息提示
- 操作成功 / 失败提示
- 确认操作弹窗
- 错误信息提示
8. 页面导航结构
├── 登录/注册
├── 主页(设备列表)
├── 添加设备
├── 个人中心
│ ├── 账单详情
│ ├── 发票管理
│ ├── 购买积分
│ ├── 兑换码
│ └── 其他设置
├── 单臂控制
│ ├── 仪表盘
│ ├── 可视化
│ ├── 固件更新
│ └── 设置
└── 双臂控制
├── 仪表盘
├── 固件更新
└── 设置
9. 快捷操作说明
| 功能 | 说明 | 适用设备 |
|---|---|---|
| 回归原点 | 使机械臂回到预设的零点位置 | 单臂 |
| 系统自检 | 对设备进行全面诊断,检测各模块状态 | 单臂 / 双臂 |
| 力矩控制 | 开启 / 关闭电机力矩,关闭后可手动拖动(示教模式) | 单臂 / 双臂 |
| 设定零点 | 将当前位置设为机械臂的零点 | 单臂 / 双臂 |
| 同步控制 | 使双臂同步运动 | 双臂 |
| 锁定控制 | 锁定双臂的相对位置关系 | 双臂 |
本文档描述 Synria Desk 软件的主要功能,具体操作界面可能因版本更新而有所变化。