核心产品
从硬件到软件的完整开发链路
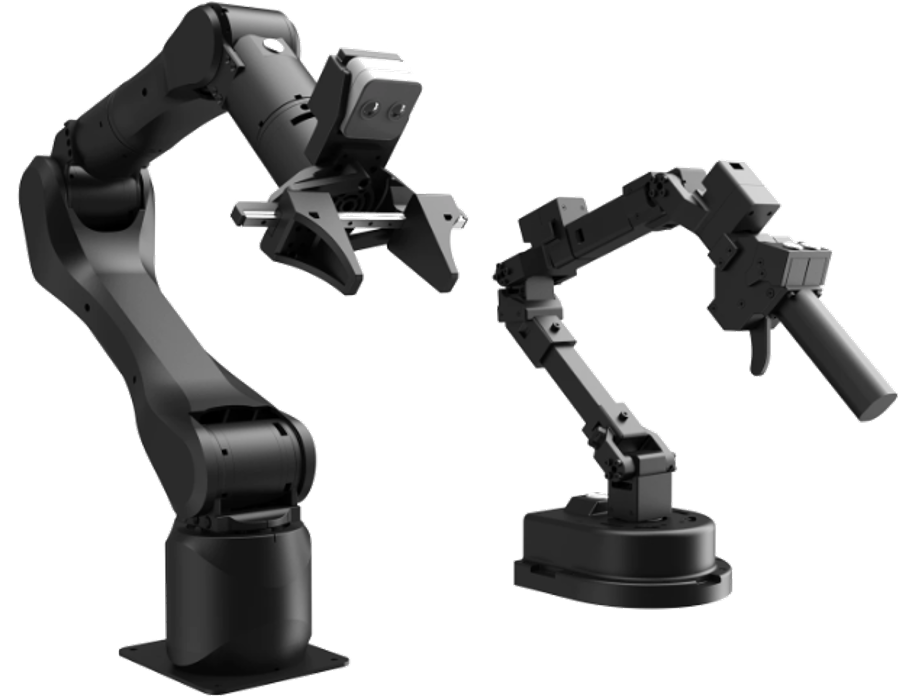
灵动 Alicia-D 与 云擎 Alicia-M 机械臂,配合 Synria Desk 上位机,覆盖连接、控制、数据采集与二次开发。
遥操作 / 数据采集套件
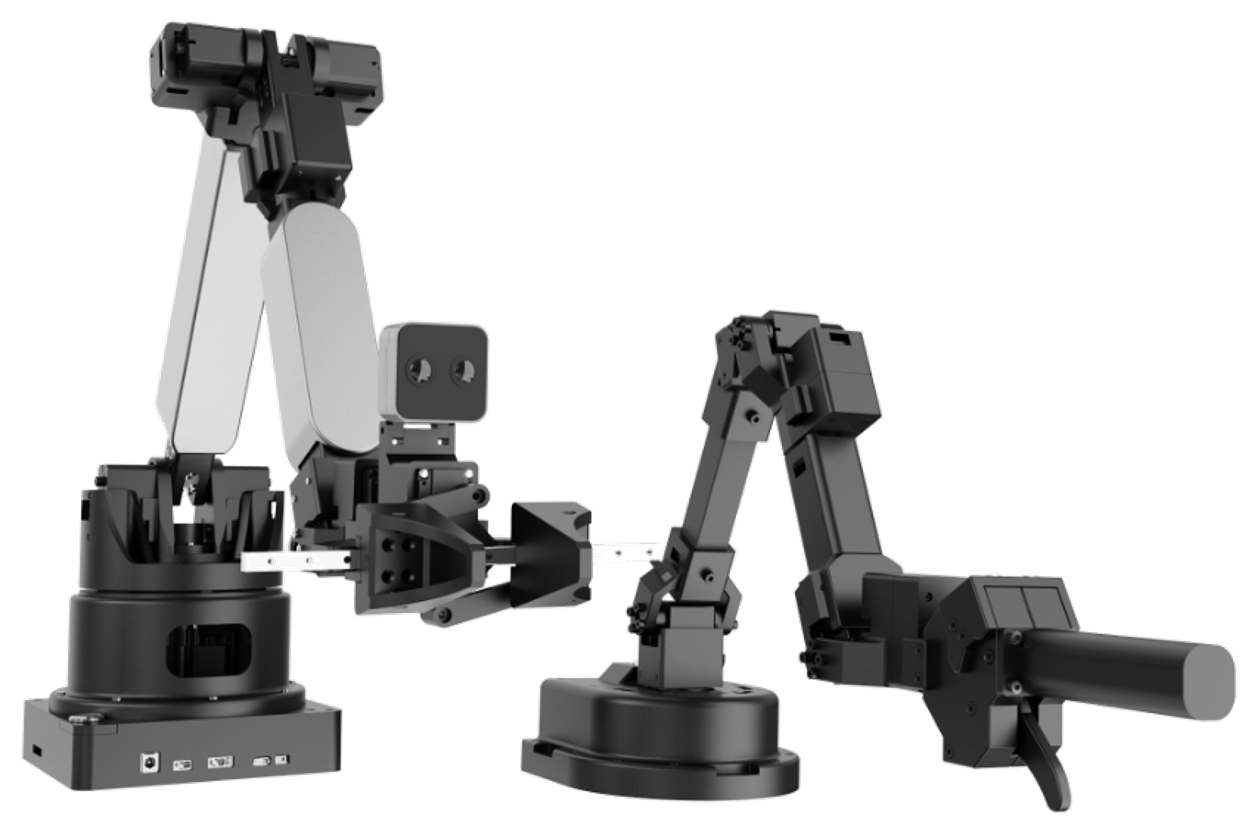
整机套件 + Synria Desk 一体化具身平台,开机即可遥操作并完成数据采集。
机械臂本体
试教器 + 灵动 / 云擎 操作臂,构成主从遥操作与示教的硬件核心。
主从遥操作 · 示教采集
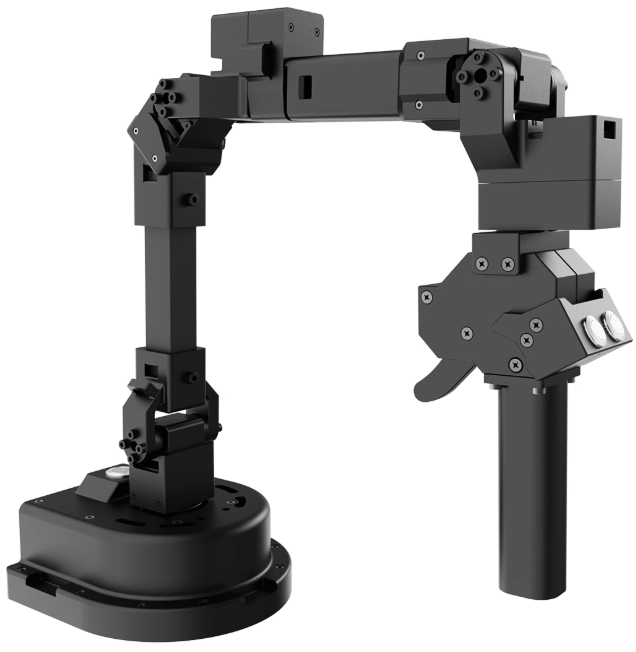
试教器 Alicia-DLLeader / Teach Pendant
便携式示教主臂,通过主从遥操作实时驱动机械臂完成动作示教与数据采集,是模仿学习数据集构建的核心工具。
- 主从遥操作
- 动作示教与采集
- 适配灵动 / 云擎

六轴桌面舵机机械臂 · 教育科研
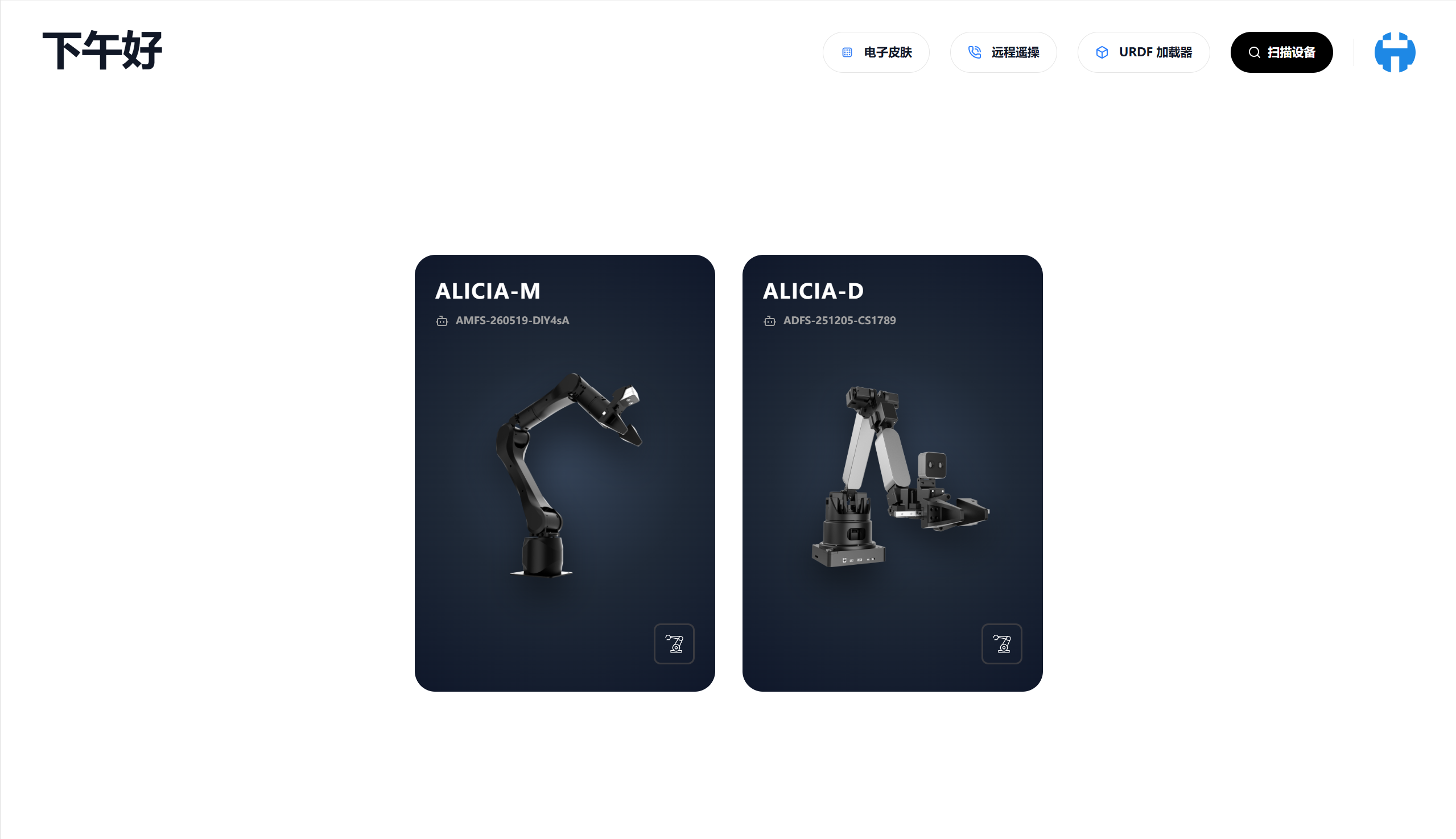
灵动 Alicia-DAlicia-D Series
高性价比六轴桌面舵机机械臂,覆盖操作臂、示教臂与双臂遥操作,面向教育、科研与具身智能算法(ACT / VLA / World Model)复现。
- 6 DoF(含夹爪 7 DoF)
- 工作半径 650mm
- 重复定位 ±2mm
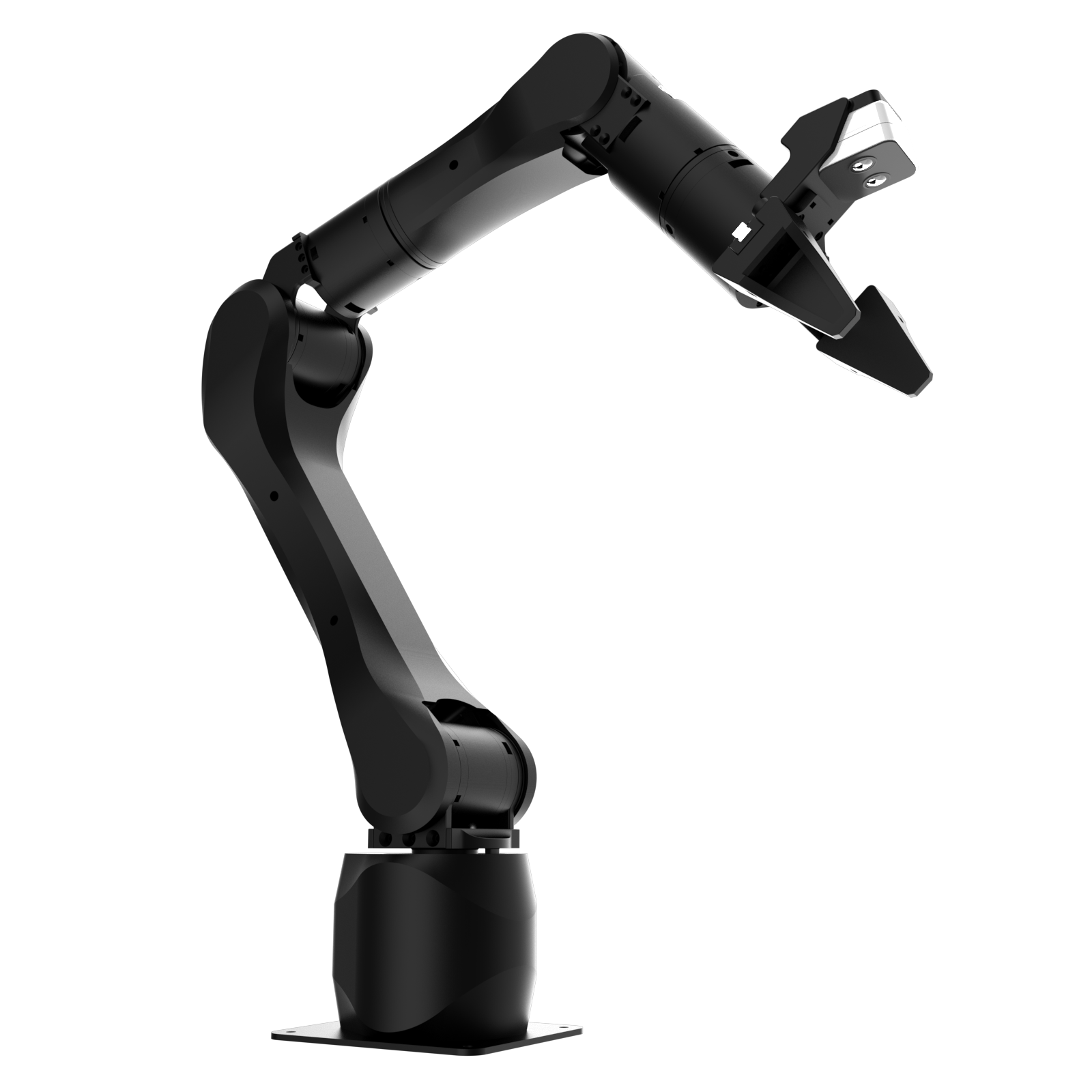
六轴伺服机械臂 · 轻工业 / 高精度
云擎 Alicia-MAlicia-M Series
轻工业级六轴伺服机械臂,提供更高负载、精度与刚性,面向高端科研、高精度遥操作、数据采集与策略部署。
- 工作半径 750mm
- 负载 1.5kg
- 重复定位 ±0.1mm
推荐使用流程
从开箱到二次开发
建议先用上位机完成连接与验证,再进入 SDK / 协议 / ROS 做开发。
01
选型确认
在产品页对比 灵动 Alicia-D 与 云擎 Alicia-M 的规格与适用场景,确认你的设备型号。
02
上位机上手
用 Synria Desk 完成设备连接、可视化与基础控制,快速验证硬件状态。
03
二次开发
进入 Python SDK、通讯协议或 ROS 文档,进行数据采集、遥操作与策略部署。
配件与扩展
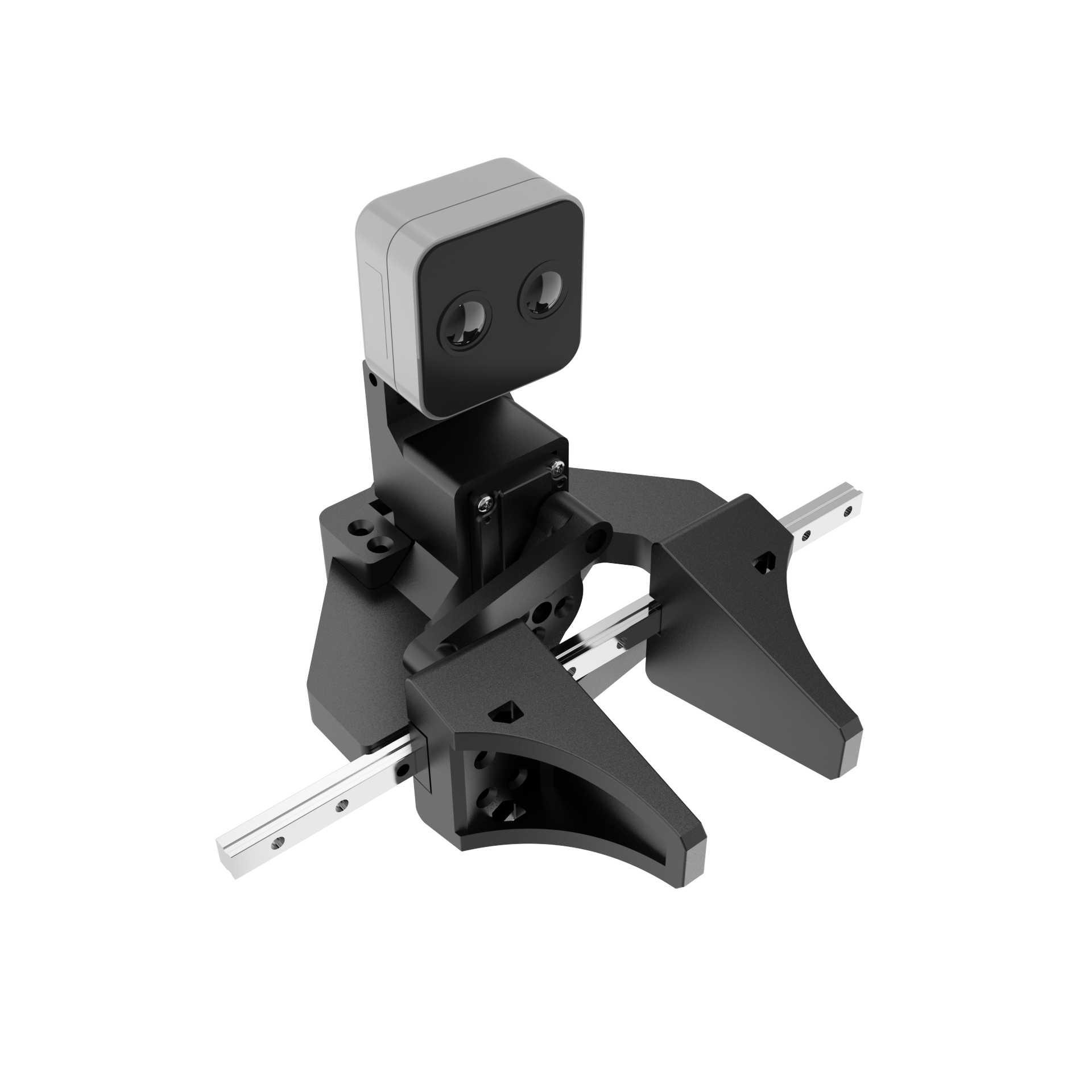
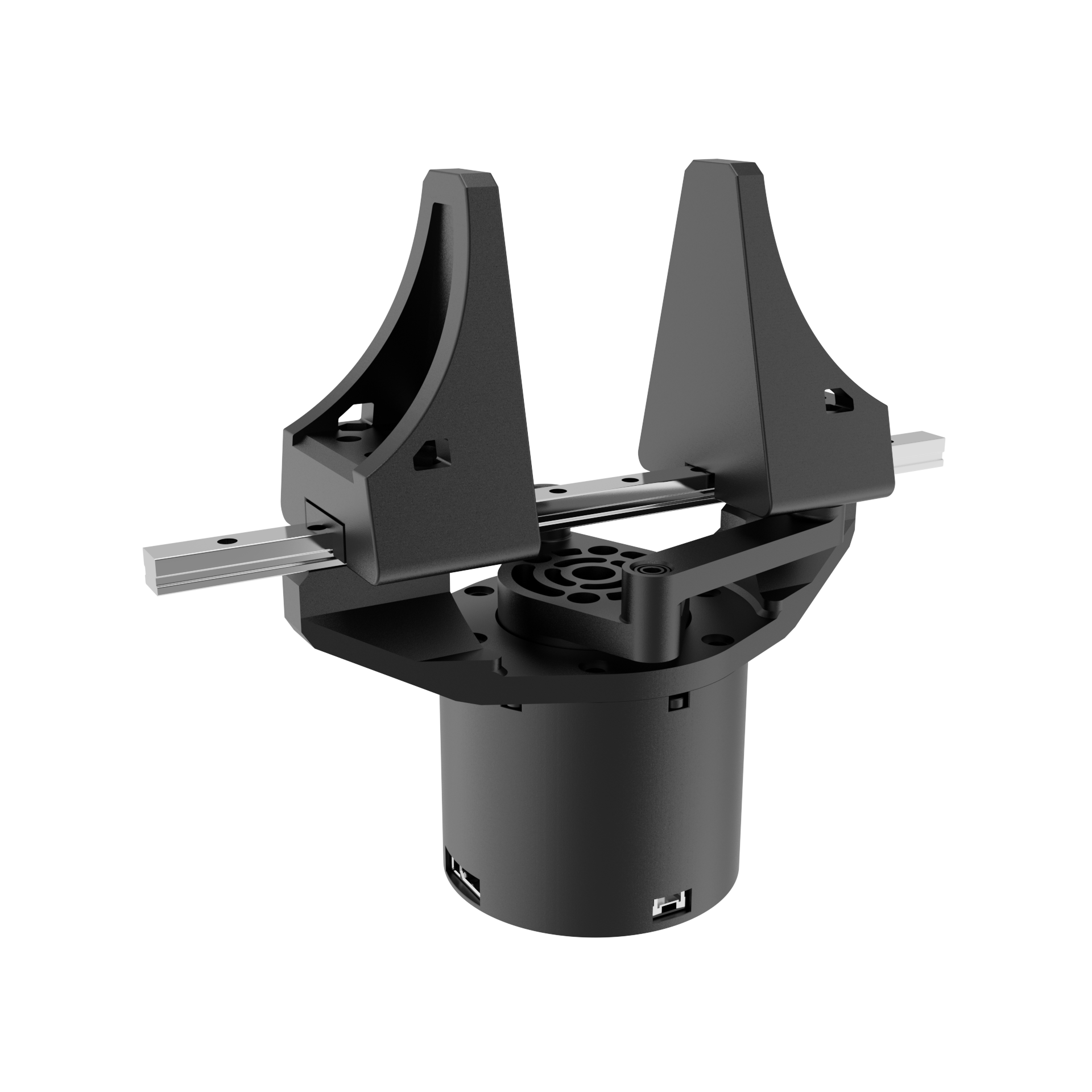
末端执行器与外设
与机械臂配合使用的夹爪与感知外设,按需拓展抓取与交互能力。

开发者资源
开源 SDK 与 ROS 生态
Python SDK、ROS1 / 2、VLM 语义抓取与数据采集框架,全部开源在 GitHub。
灵动 Alicia-D
- Alicia-D-SDKPython SDK:状态读取、关节 / 末端位姿 / 夹爪控制、正逆运动学。
- Alicia-D-ROS1ROS1 驱动、MoveIt 配置、拖动示教与抓取示例。
- Alicia-D-ROS2ROS2 Humble 支持,标准话题接口与完整控制链路。
- Alicia-D-VLM-Grasp基于视觉语言模型(VLM)的语义抓取示例。
- lerobot模仿学习与数据采集框架,遥操作配套使用。
云擎 Alicia-M
- Alicia-M-SDKPython SDK:串口通信、状态读取、关节 / 夹爪控制。
- Alicia-M-ROS2ROS2 控制包:同步控制、MoveIt 接口与手眼标定。
- lerobot模仿学习与数据采集框架,遥操作配套使用。
夹爪 Gloria
- Gloria-D-SDK灵犀 Gloria-D:串口通信,力控 / 非力控模式控制。
- Gloria-M-SDK云犀 Gloria-M:TTL 转 CAN,位置 / 速度 / 力矩,MIT / PV 模式。
通用工具与外设
- RoboCore统一机器人工具库:建模 / 运动学 / 动力学 / MuJoCo 桥接,多后端高性能。
- Synria-C10-SDKSynria-C10 USB 相机,支持 RGB 图像读取。