操作臂3D可视化控制
选择灵动(Alicia-D)或云擎(Alicia-M)操作臂设备后,进入单臂控制工作区。无需编写任何代码,即可通过图形界面完成关节控制、笛卡尔空间 IK 操作与轨迹规划,并实时驱动实体机械臂。左侧导航包含:
- 仪表盘
- 可视化控制
- 固件管理
- 设备设置
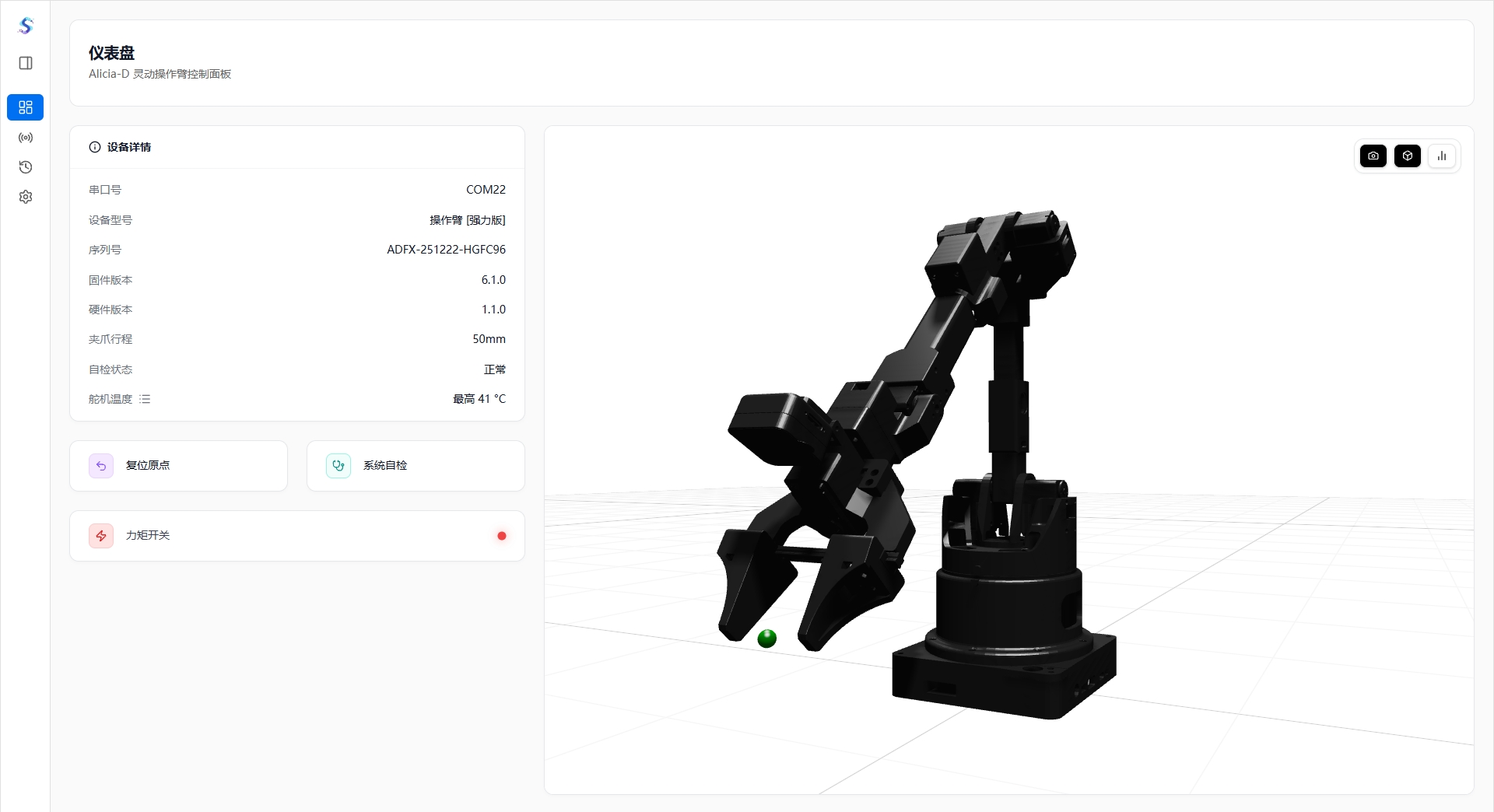
仪表盘(Dashboard)
仪表盘用于查看设备状态并执行常用控制:
- 显示连接状态、设备型号、序列号、固件版本、硬件版本、夹爪信息、自检状态。
- 支持连接 / 断开设备。
- 支持复位原点。
- 支持系统自检。
- 支持查看关节温度 / 电机温度,温度过高时提供保护提示。
- 右侧集成 3D 空间状态组件,实时展示姿态与关节数据。
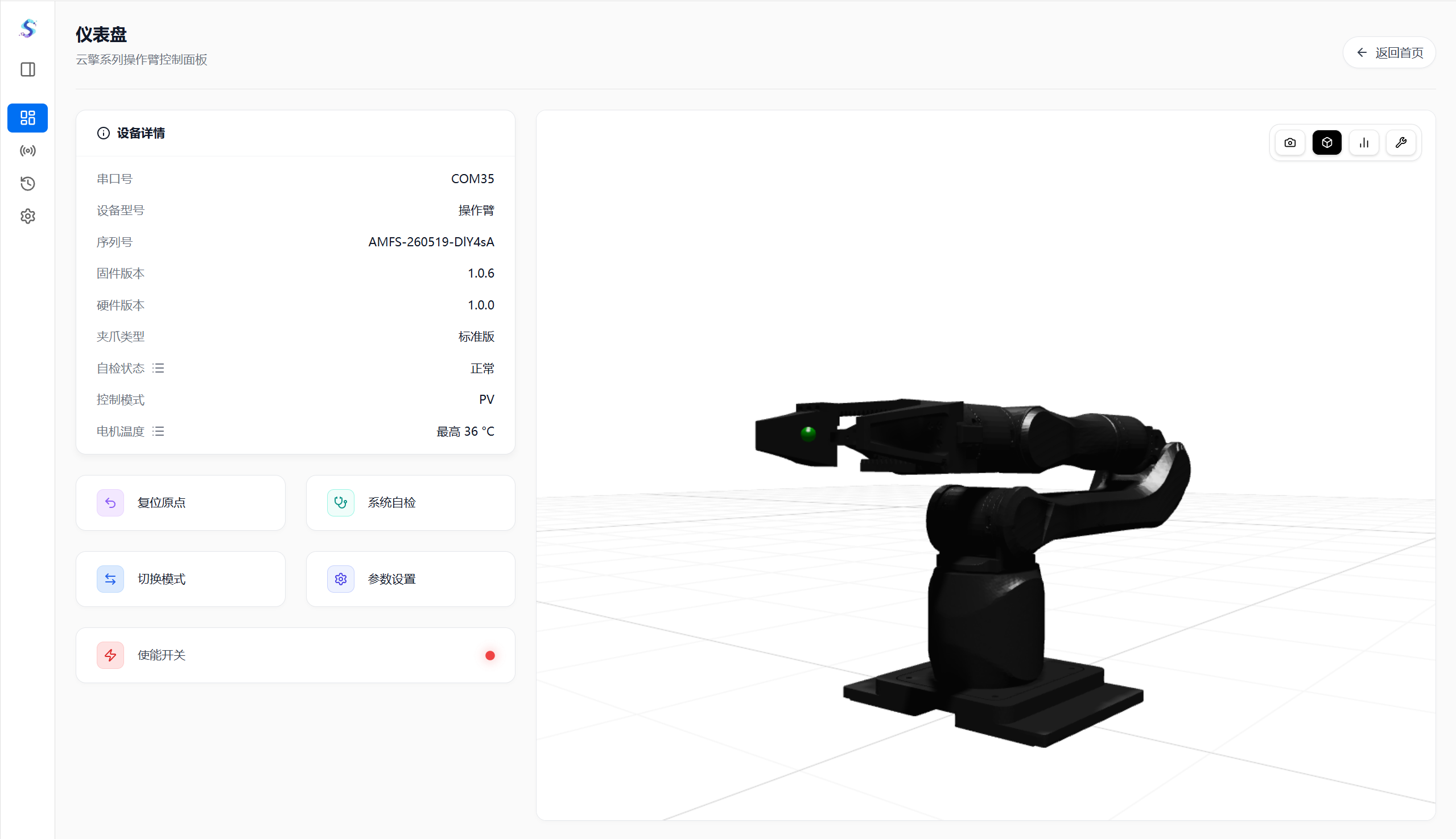
根据设备型号不同,控制项略有差异:
- Alicia-D:提供力矩开关。
- Alicia-M:提供使能开关、模式切换与参数设置。
可视化控制(SparkVis)
该页面用于机械臂 3D 可视化与交互控制,当前界面包含:
- 末端位置与姿态实时显示。
- 世界 / 本地坐标系指示。
- 3D 模型显示与交互。
- 网格、坐标轴、透视模式切换。
- 示例代码弹窗,可复制代码片段。
右侧控制区包含三个标签页:
关节控制
- 调节各关节角度。
- 调节夹爪开合。
- 支持滑块与输入框联动控制。
笛卡尔空间
- 开启 / 关闭 IK 控制。
- 切换平移 / 旋转模式。
- 切换世界 / 本地参考系。
- 控制末端执行器与夹爪。
- 支持快捷键辅助操作。
轨迹规划
- 添加路径点。
- 设置停留时间
- 生成轨迹。
- 执行、暂停、停止轨迹。
- 导入 / 导出轨迹。
- 支持循环执行等扩展参数。
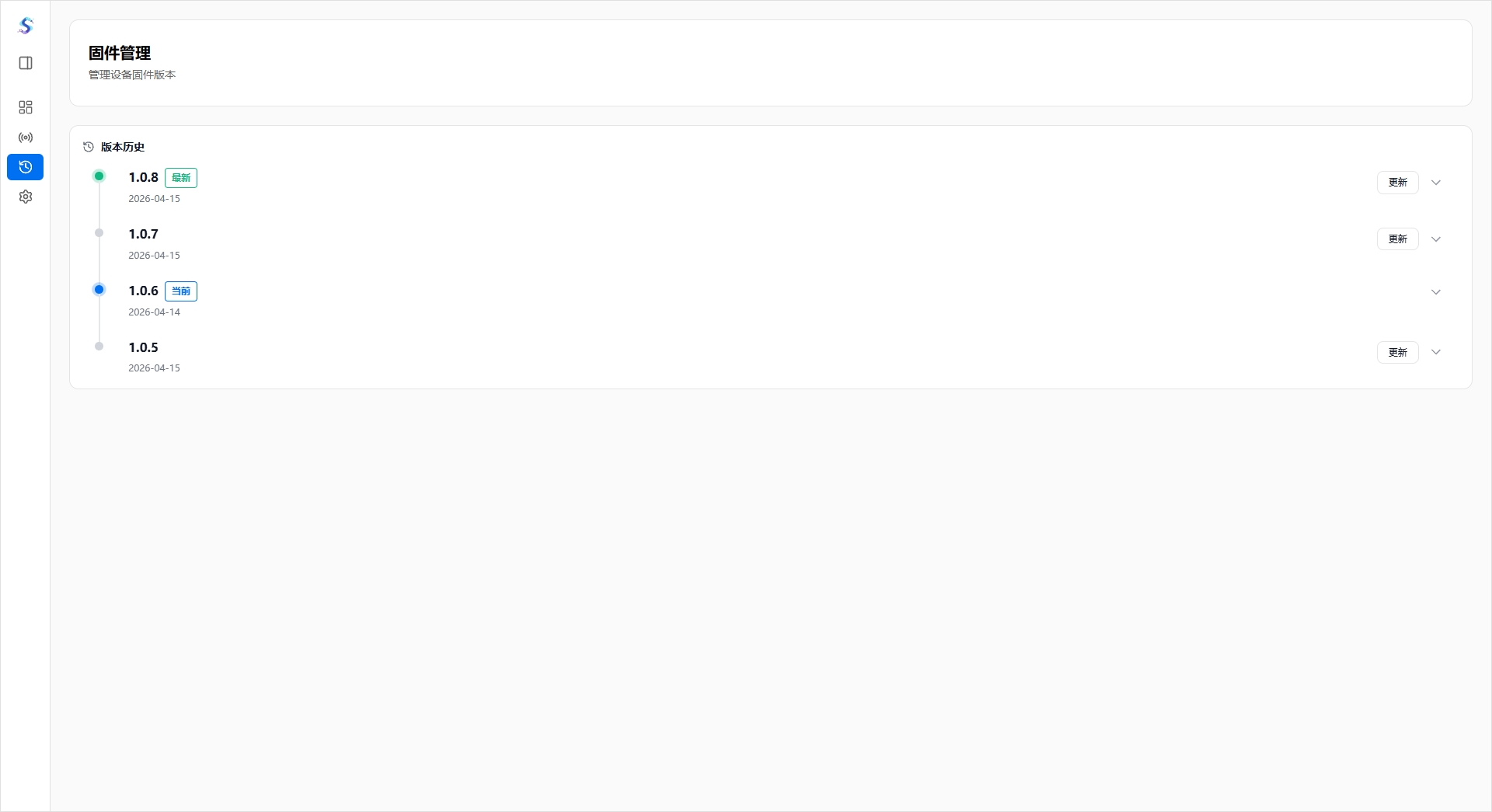
固件管理(Firmware)
机械臂设备的固件管理页:
- 查看当前固件版本。
- 检查是否有可用更新。
- 查看版本历史与更新日志。
- 执行固件升级。
- 在支持场景下执行版本回退。
烧录过程中请勿断开设备连接;完成后设备可能自动重启。
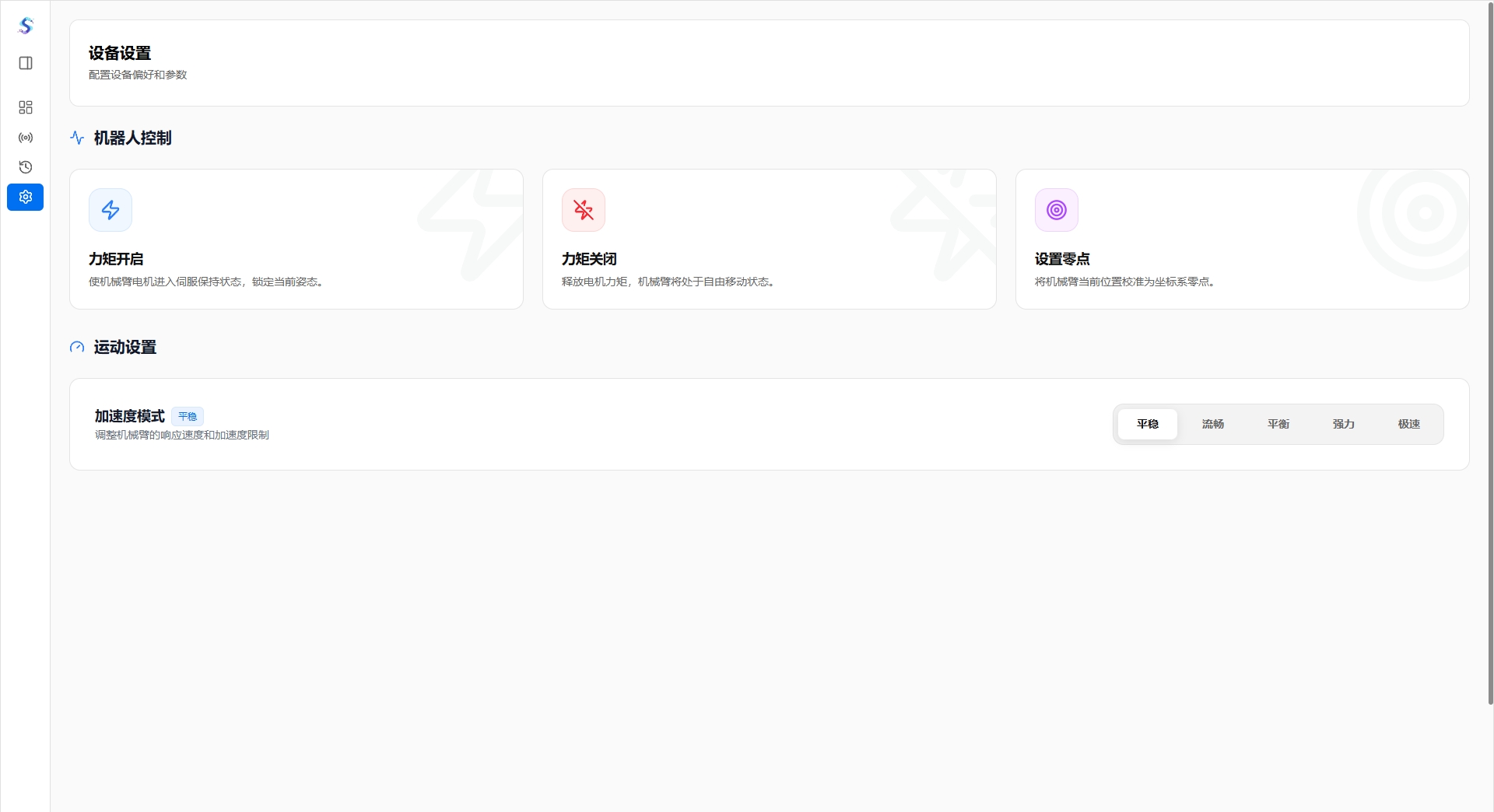
设备设置(Settings)
设备设置页用于配置设备偏好与运行参数:
- 支持机器人控制,可设置零点,将机械臂当前位置校准为坐标系零点。
- 支持运动设置,可切换不同加速度 / 响应模式,包括平稳、流畅、平衡、强力、极速档位。
根据设备型号不同,设置项略有差异:
- Alicia-D:在机器人控制中,可控制力矩开启和关闭。
- Alicia-M:支持夹爪参数配置,可读取 / 修改、保存目标夹持力、张开/闭合前馈力矩、最大保持力矩、力控比例/积分、积分限幅与接近闭合时的力矩缩放比例参数。