自定义 URDF 与可视化
该模块适合进行机器人模型加载、运动学验证和自定义 3D 可视化控制。
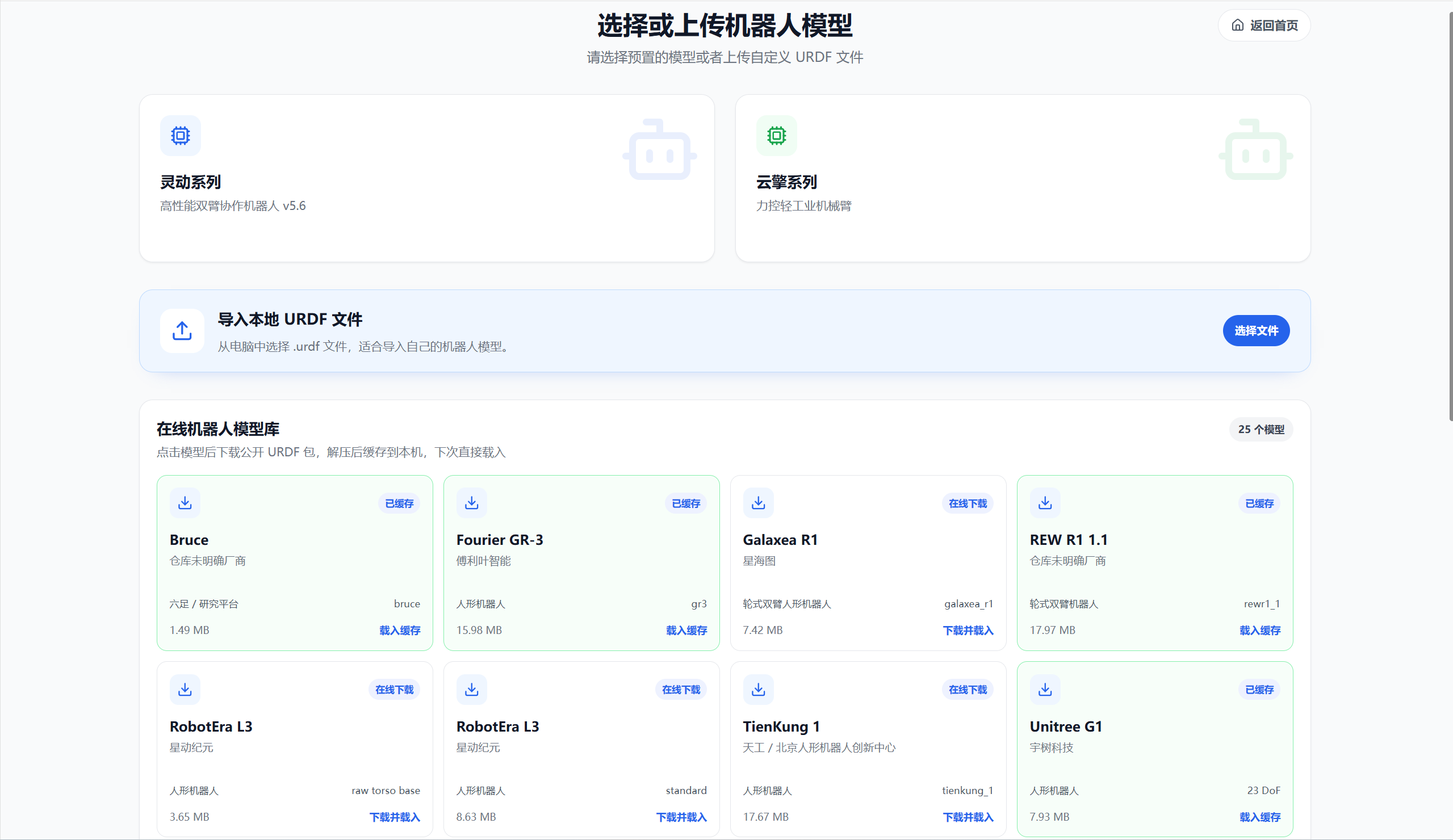
URDF 加载器
URDF 加载器用于选择或导入机器人模型:
- 预置系列:提供灵动系列、云擎系列常用机器人模型入口。
- 本地导入:从电脑中选择
.urdf文件,加载自己的机器人模型。 - 在线机器人模型库:展示公开机器人模型,支持下载安装到本地缓存。
在线模型会显示当前状态:
- 已缓存:模型已下载到本地,可直接载入缓存。
- 在线下载:模型尚未下载,可先下载再使用。
- 下载并载入:下载模型后自动进入可视化控制页面。
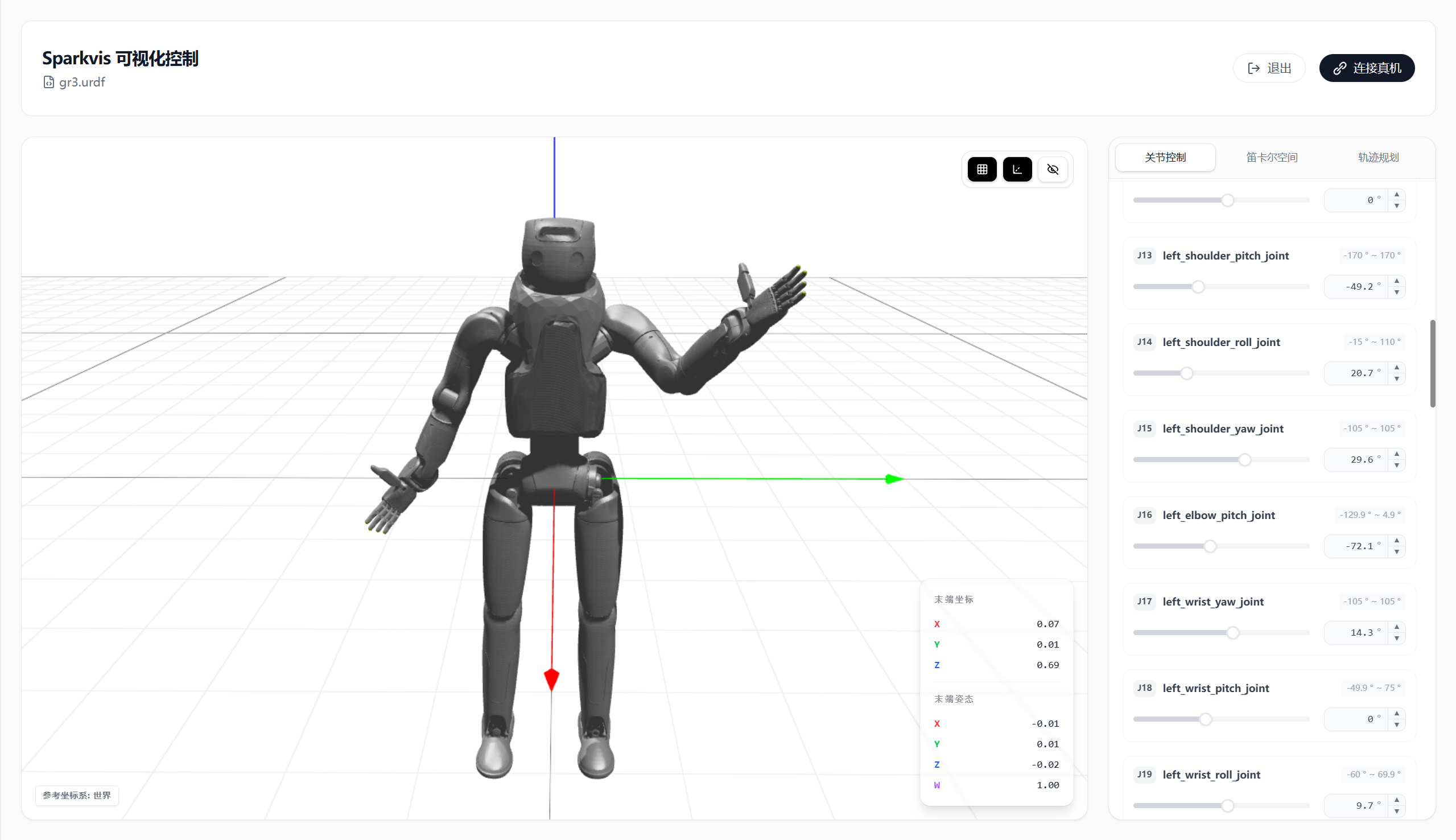
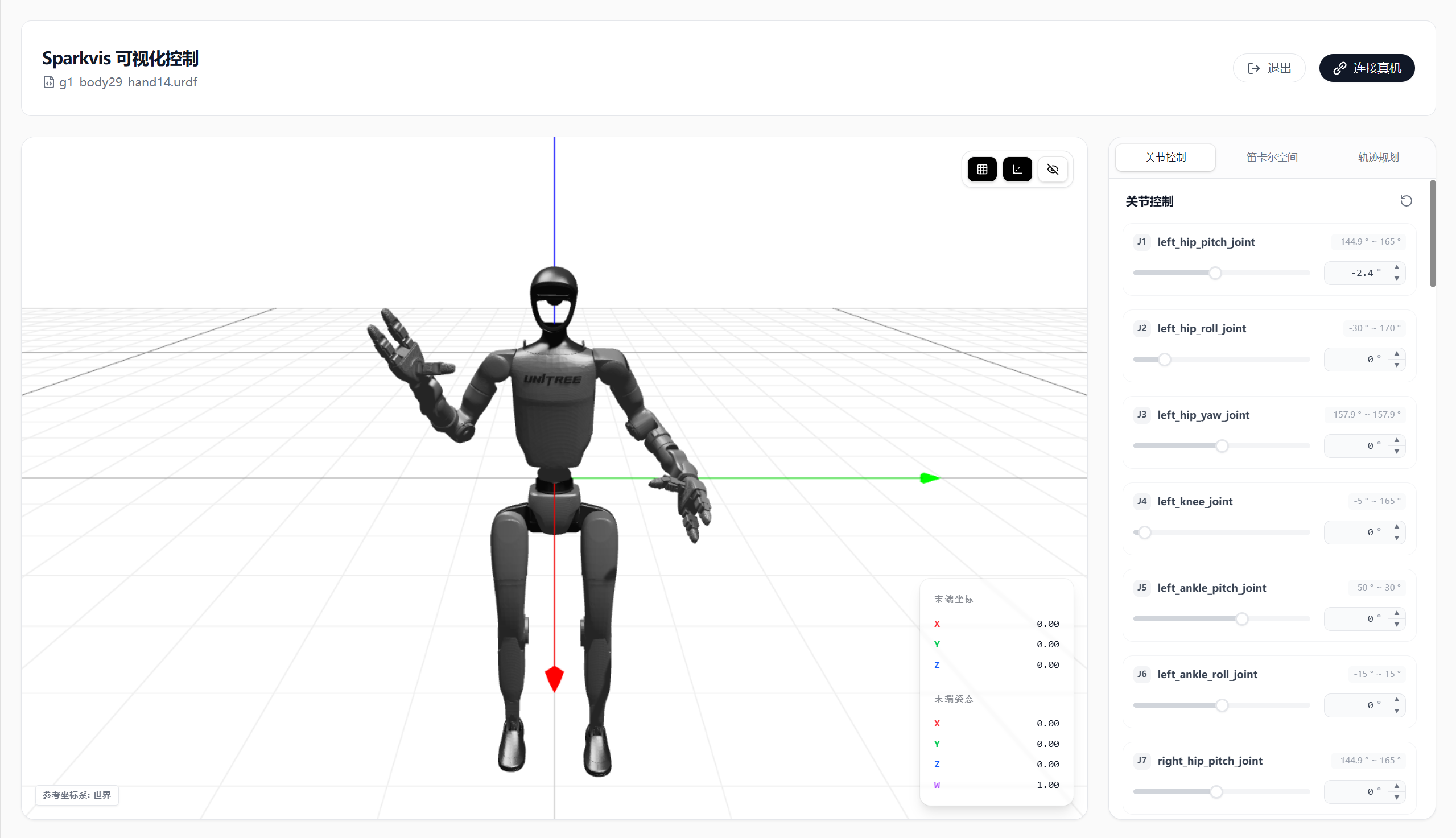
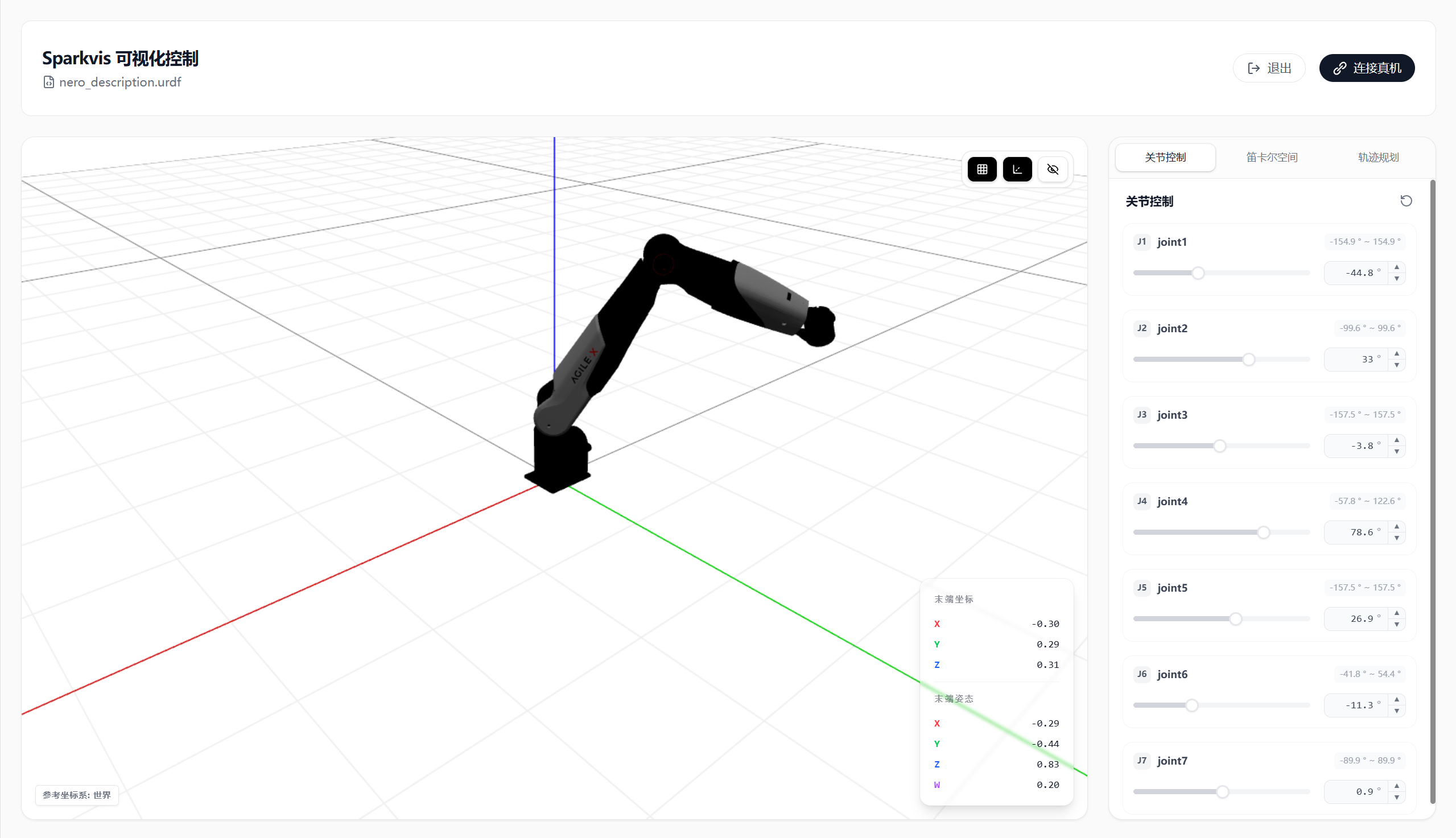
模型加载成功后,会自动跳转至 Sparkvis 可视化控制页面。
自定义可视化页面
自定义可视化页面用于查看和控制当前加载的 URDF 模型:
- 显示当前加载的
.urdf文件名称。 - 在 3D 视图中查看模型姿态、坐标轴和参考网格。
- 查看末端坐标与末端姿态信息。
- 在关节控制、笛卡尔空间、轨迹规划三个标签页间切换。
- 支持调节关节角度,用于验证模型关节限位与运动效果。
- 支持退出当前模型,或在支持场景下连接真机。