远程遥操
远程遥操用于把示教臂动作实时传递给操作臂,并同步摄像头画面。
模式入口
远程遥操首页提供两个入口:
- 示教臂模式:适合动作示教、轨迹引导与遥操控制。
- 操作臂模式:适合远程执行端接入与实时跟随。

示教臂配置流程
示教臂配置共两步:
- 选择示教臂
- 扫描可用示教臂。
- 分配左臂 / 右臂。
- 通过实时关节变化判断设备是否响应。

- 配置摄像头方案
- 选择摄像头数量。
- 选择画质等级(高清 / 超清)。
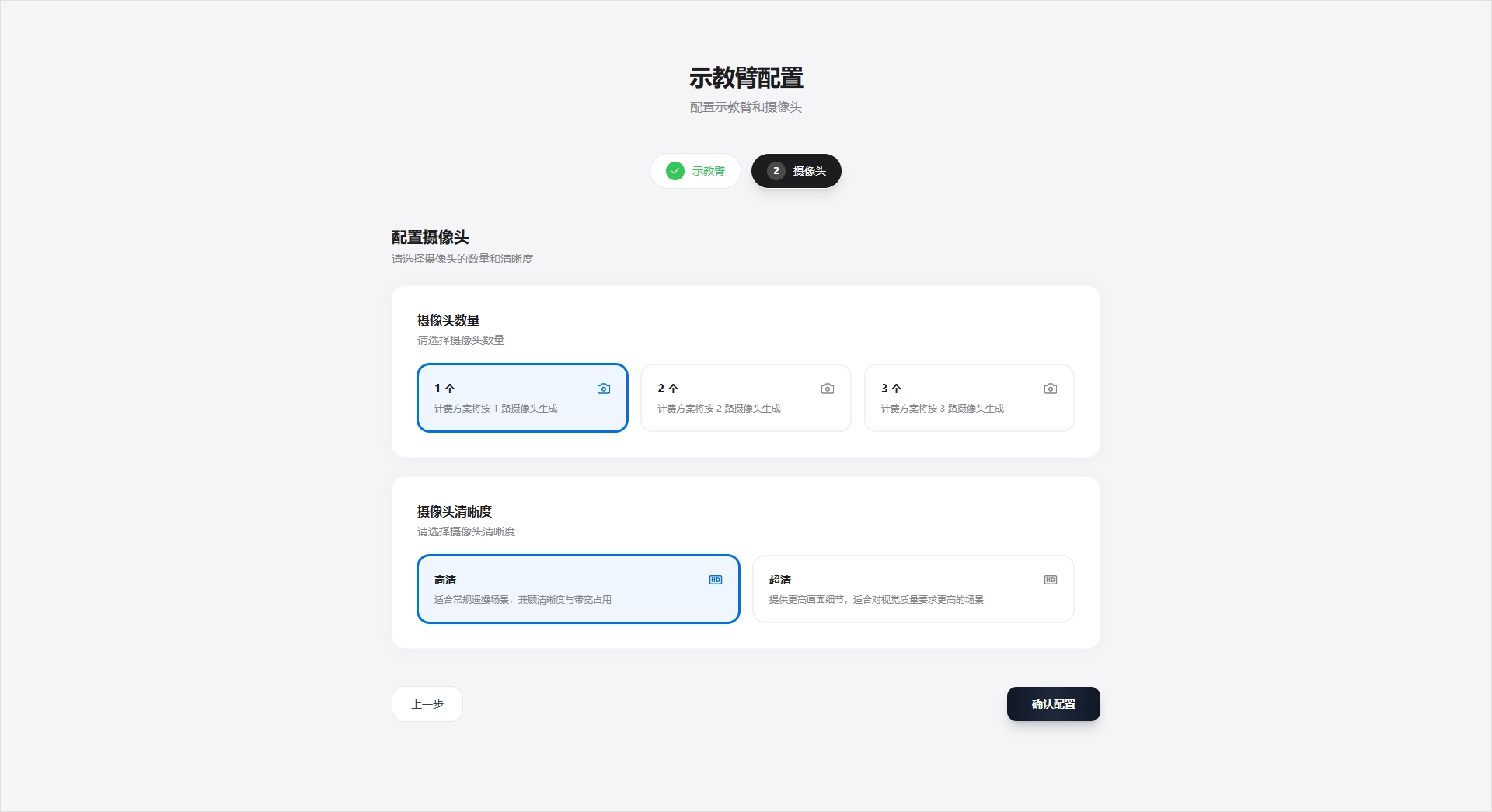
确认后进入准备就绪弹窗,并建立遥操会话。
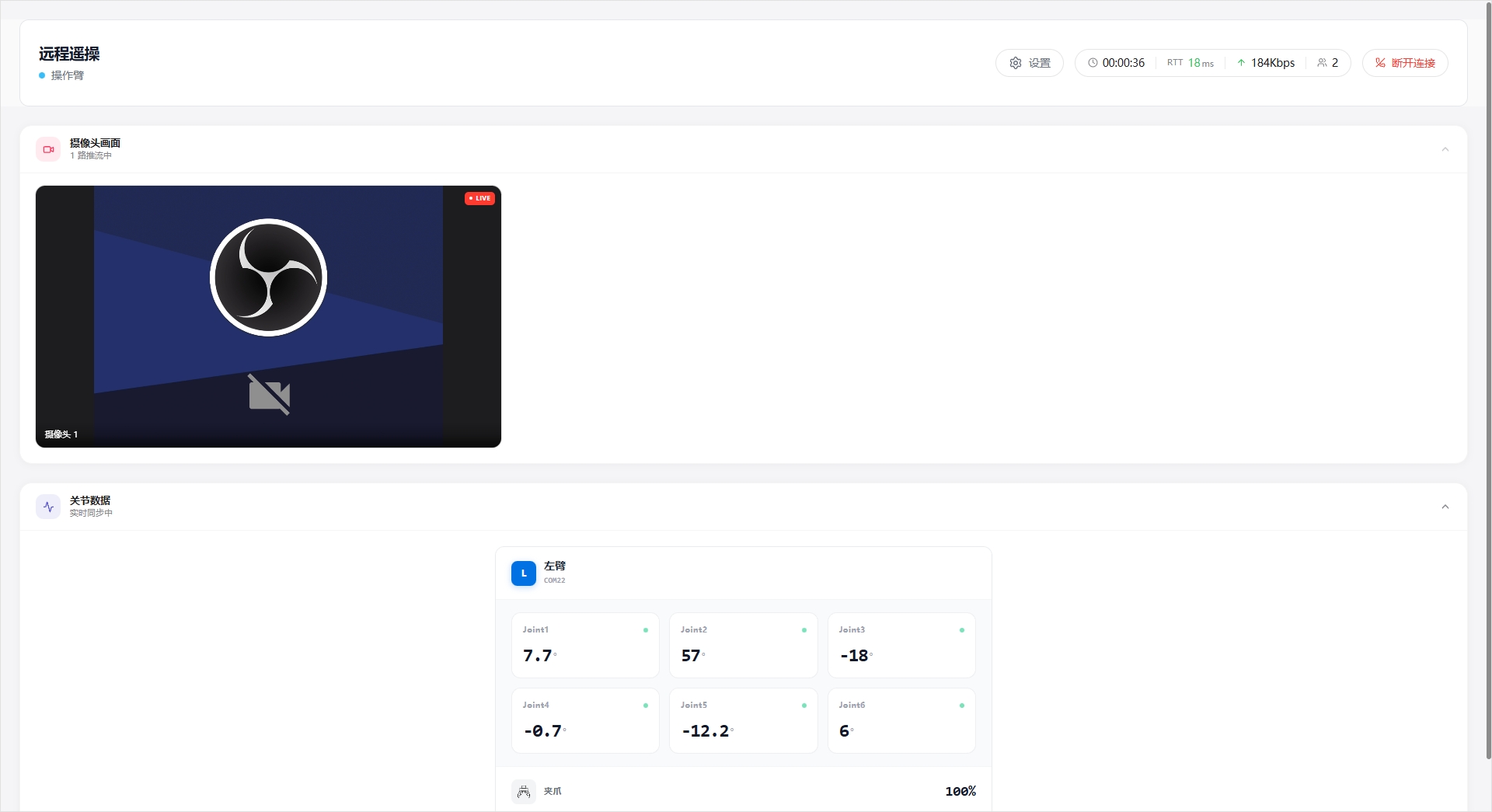
示教臂会话页面
示教臂会话页提供:
- 频道 ID 显示与复制。
- 当前网络 RTT、下行带宽、在线人数等信息。
- 计费状态、会话时长、剩余积分提示。
- 摄像头画面显示,支持 1 / 2 / 4 宫格布局。
- 侧边栏画面列表,支持拖拽调整顺序。
- 关节数据视图,实时查看左右臂关节角度与夹爪状态。
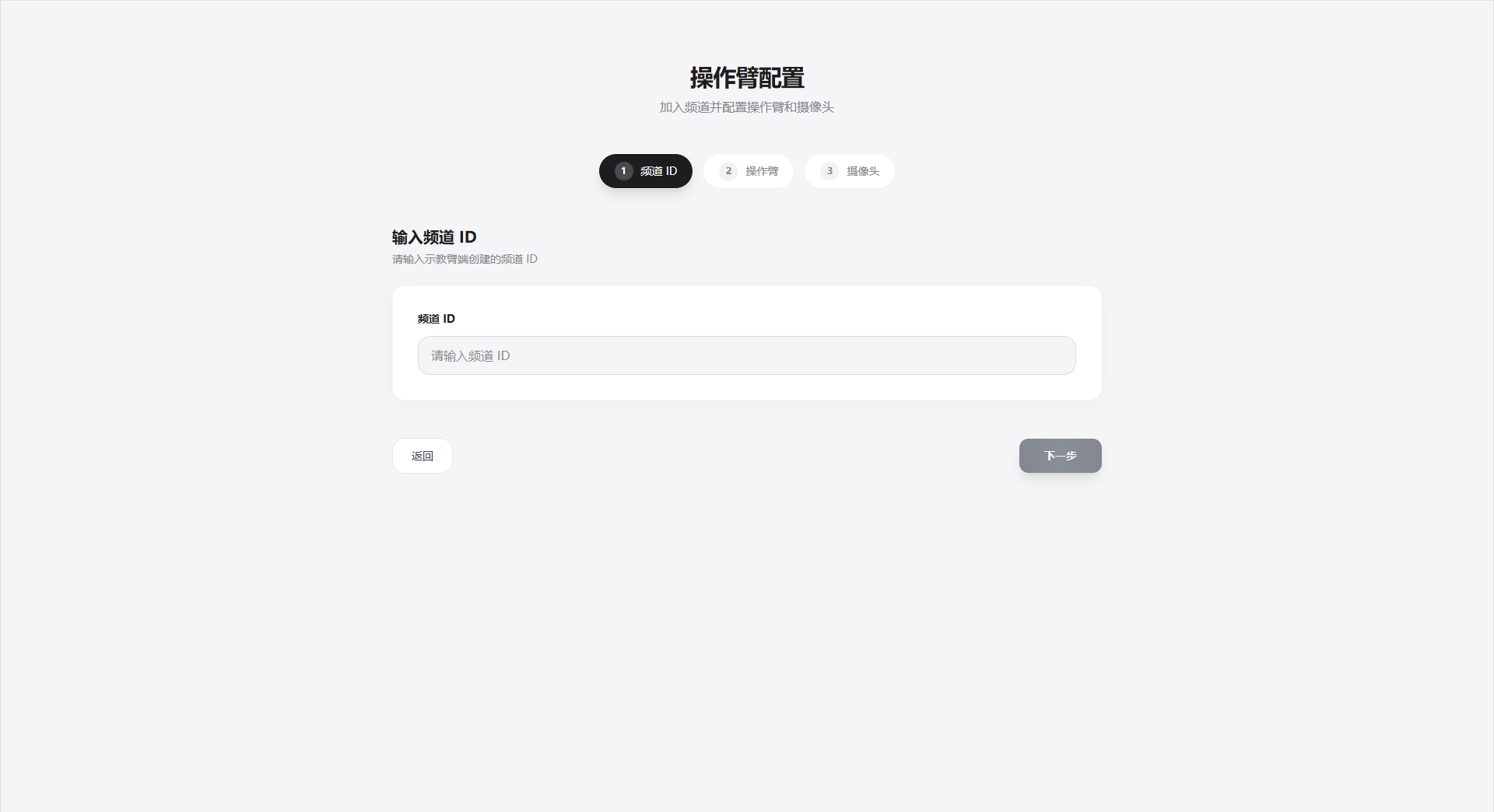
操作臂配置流程
操作臂配置共三步:
- 输入频道 ID
- 输入示教臂端创建的频道 ID。
- 解析该频道对应的摄像头方案。
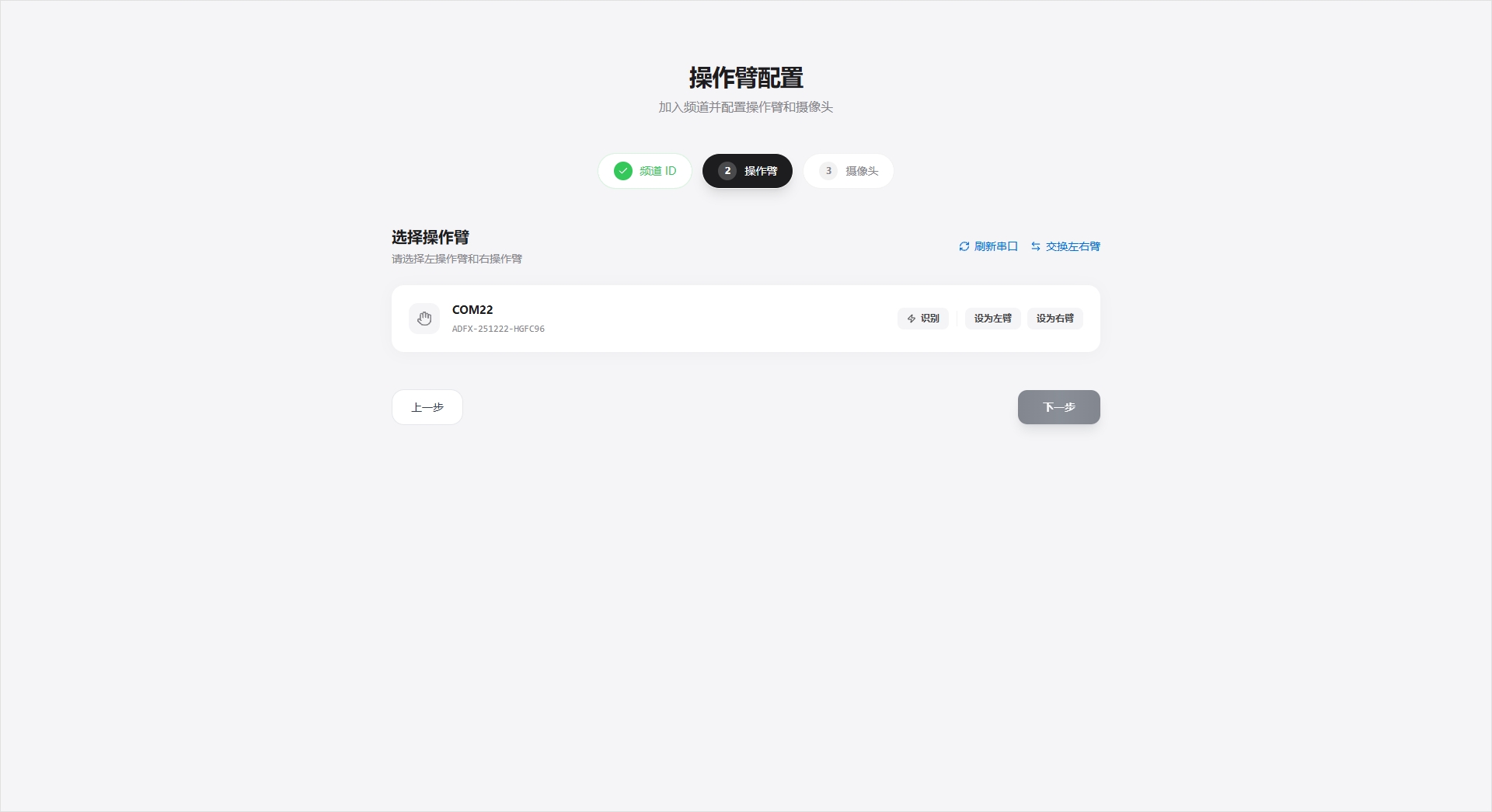
- 选择操作臂
- 扫描可用操作臂。
- 分配左臂 / 右臂。
- 支持识别设备(如触发夹爪动作辅助确认)。
- 选择摄像头
- 扫描本地摄像头。
- 预览实时画面。
- 根据频道方案选择对应数量的摄像头。

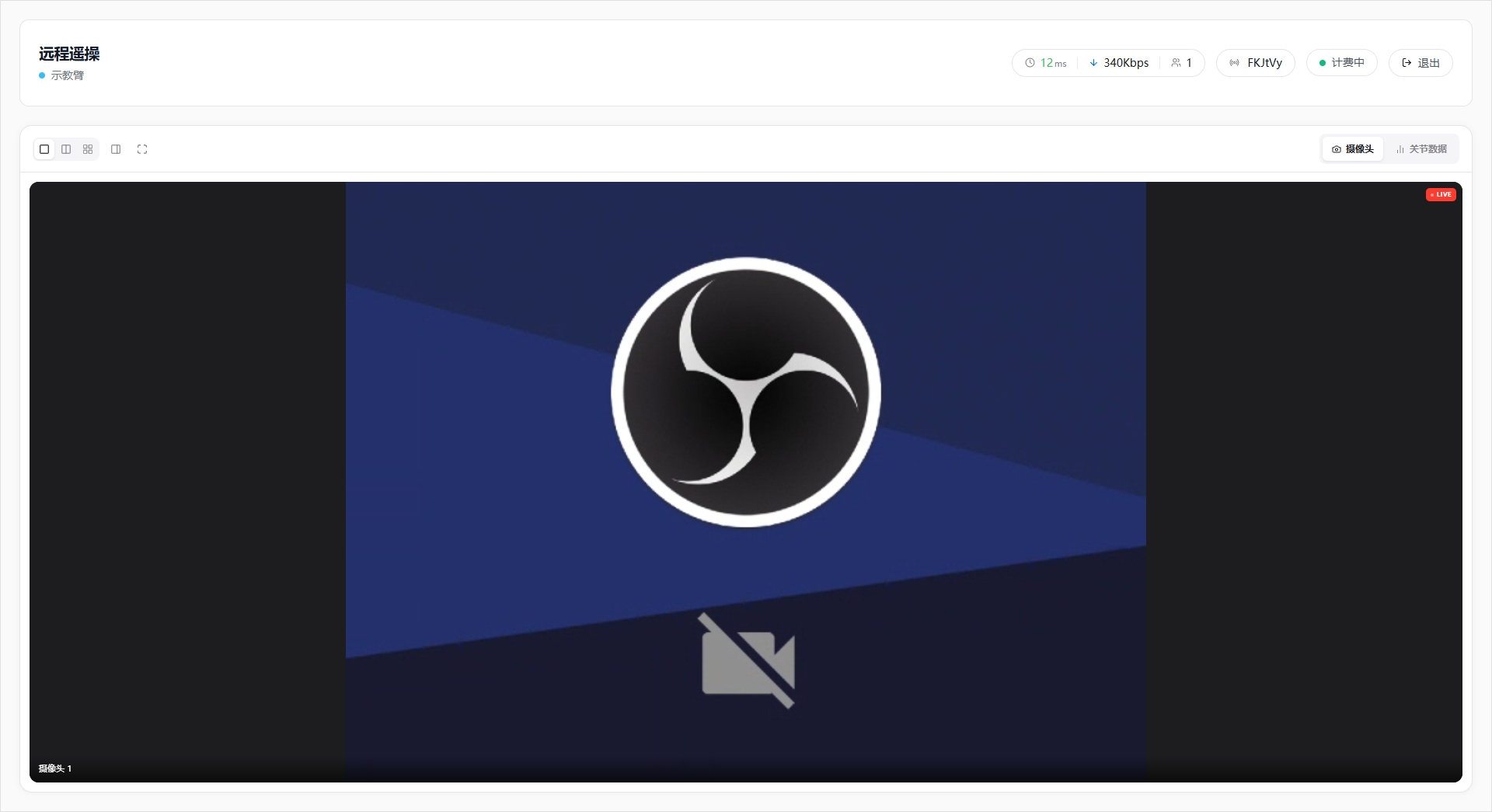
操作臂会话页面
操作臂会话页提供:
- 本地摄像头画面推流状态。
- 遥操会话时长、网络 RTT、上行带宽、在线人数信息。
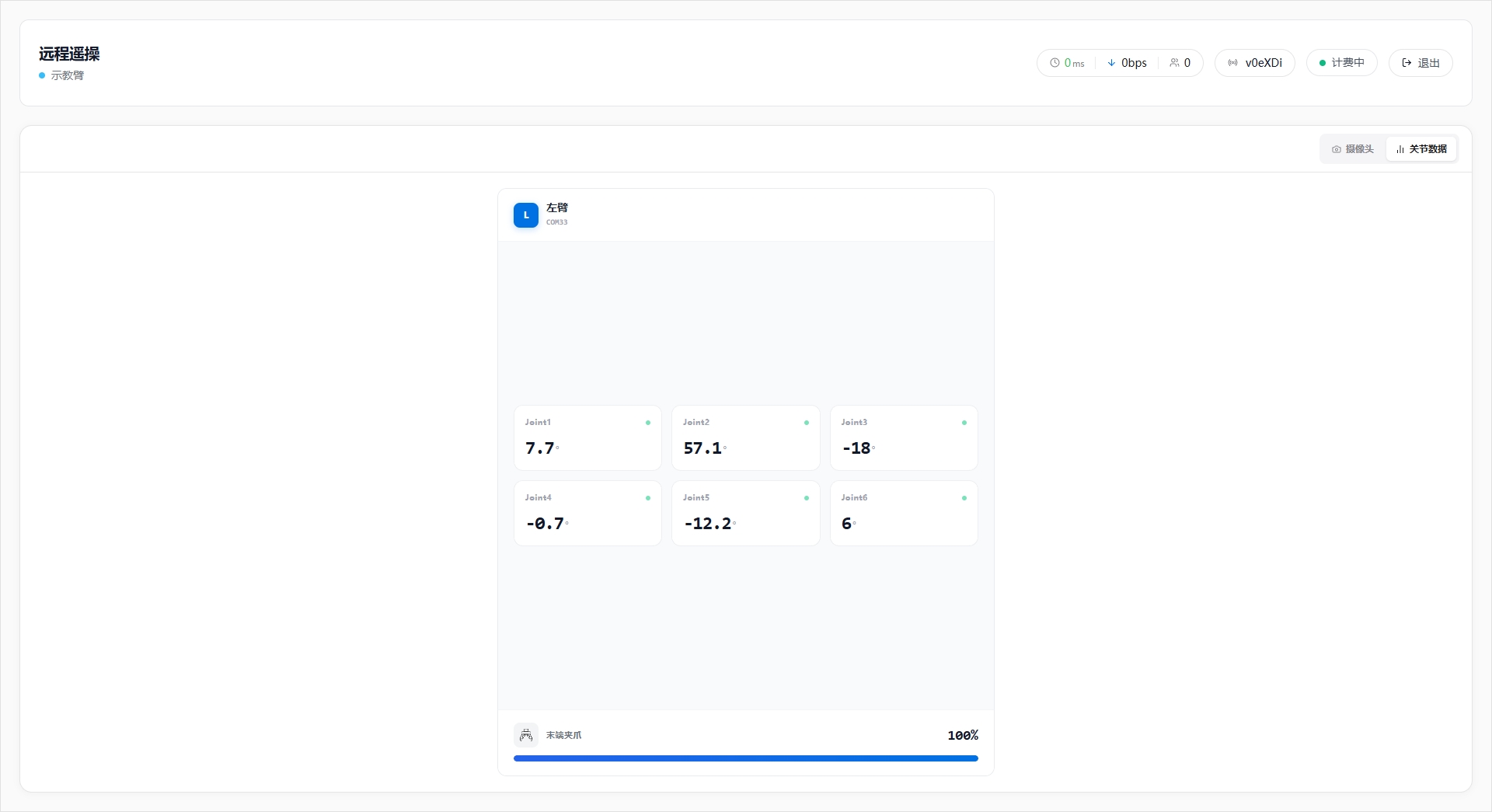
- 实时接收示教臂关节数据并驱动操作臂执行。
- 查看左右臂关节角度与夹爪状态。
- 设置面板,用于调整执行速度。
- 断开连接后返回远程遥操首页。