示教臂配置与角度映射
选择灵动示教臂(Alicia-DL)设备后,进入双臂控制工作区。通过角度映射功能,可将示教臂关节数据映射到任意品牌的操作臂,支持导入第三方 URDF 进行预览与校准,并导出映射配置直接接入 Python SDK。左侧导航包含:
- 仪表盘
- 固件管理
- 设备设置
- 角度映射
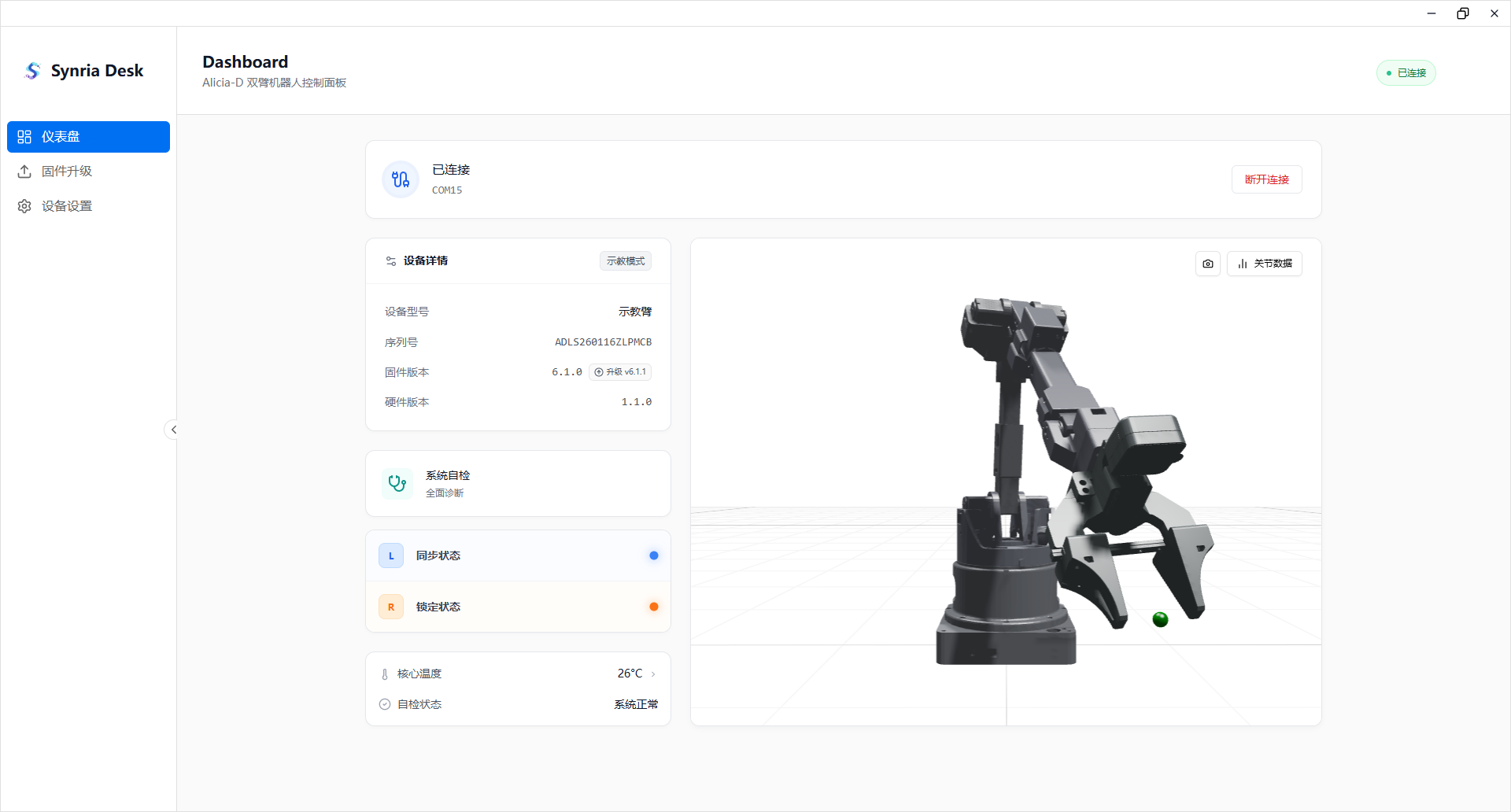
仪表盘(Dashboard)
仪表盘主要用于状态总览与双臂协同控制:
- 显示设备连接状态、设备信息与版本信息。
- 支持连接 / 断开设备。
- 支持系统自检。
- 支持温度查看与状态提示。
- 支持查看操作臂 3D 空间状态。
- 支持示教臂状态量显示:
- 同步状态
- 锁定状态
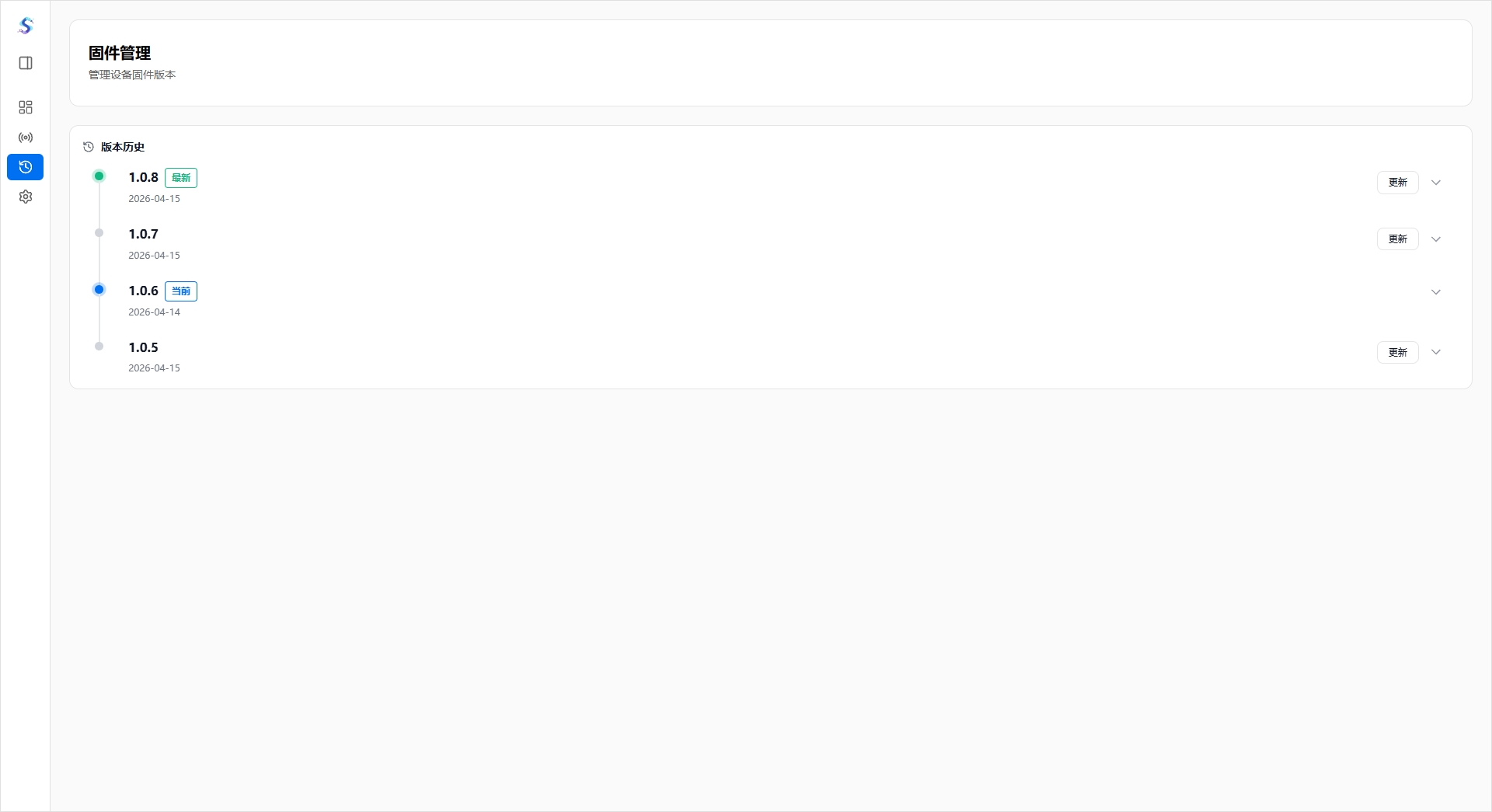
固件管理(Firmware)
机械臂设备的固件管理页:
- 查看当前版本。
- 检查更新。
- 浏览版本历史与更新说明。
- 执行升级 / 回滚。
设备设置(Settings)
设备设置页当前主要提供:
- 设置零点。
- 查看与调整相关设备参数。

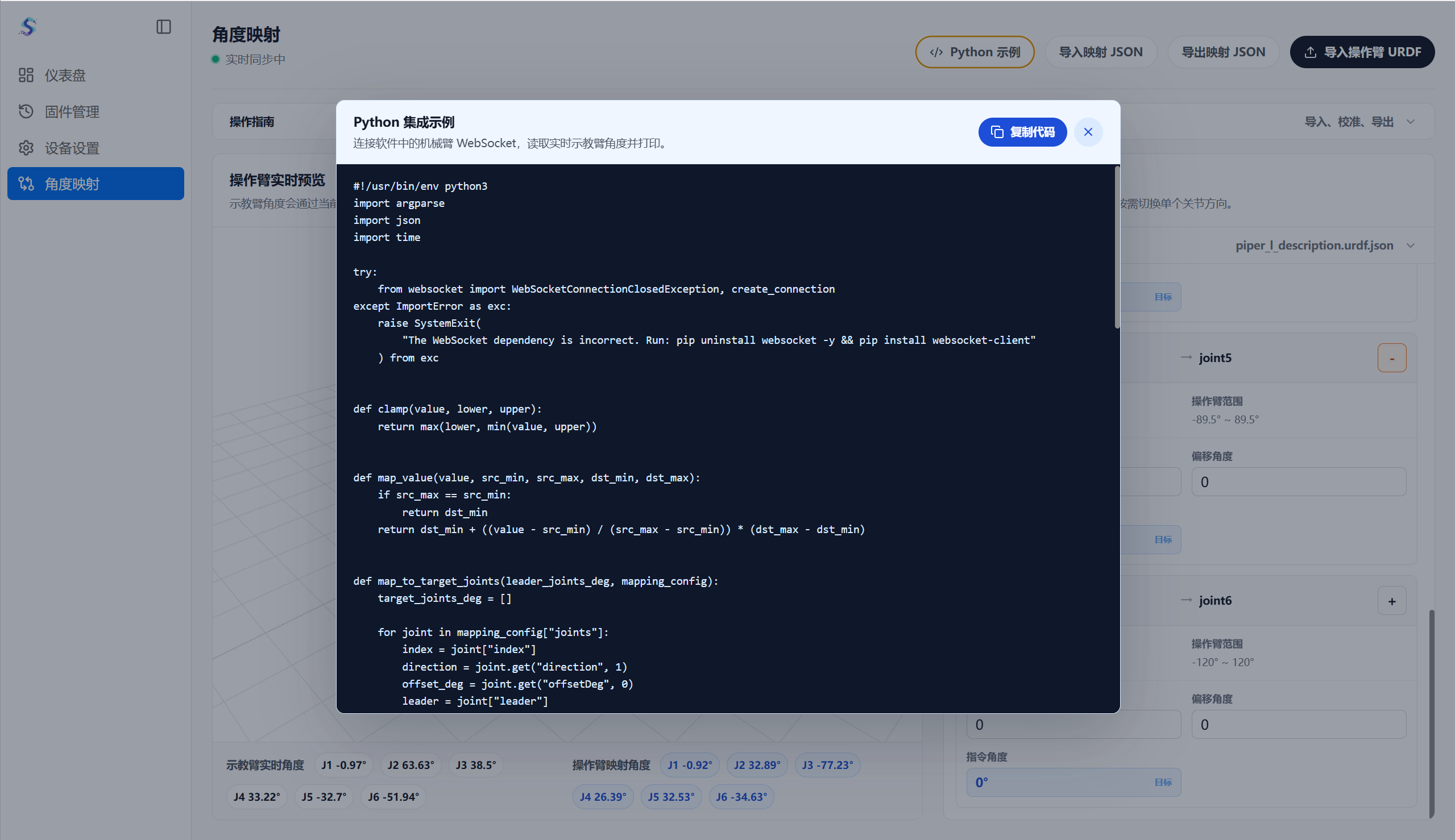
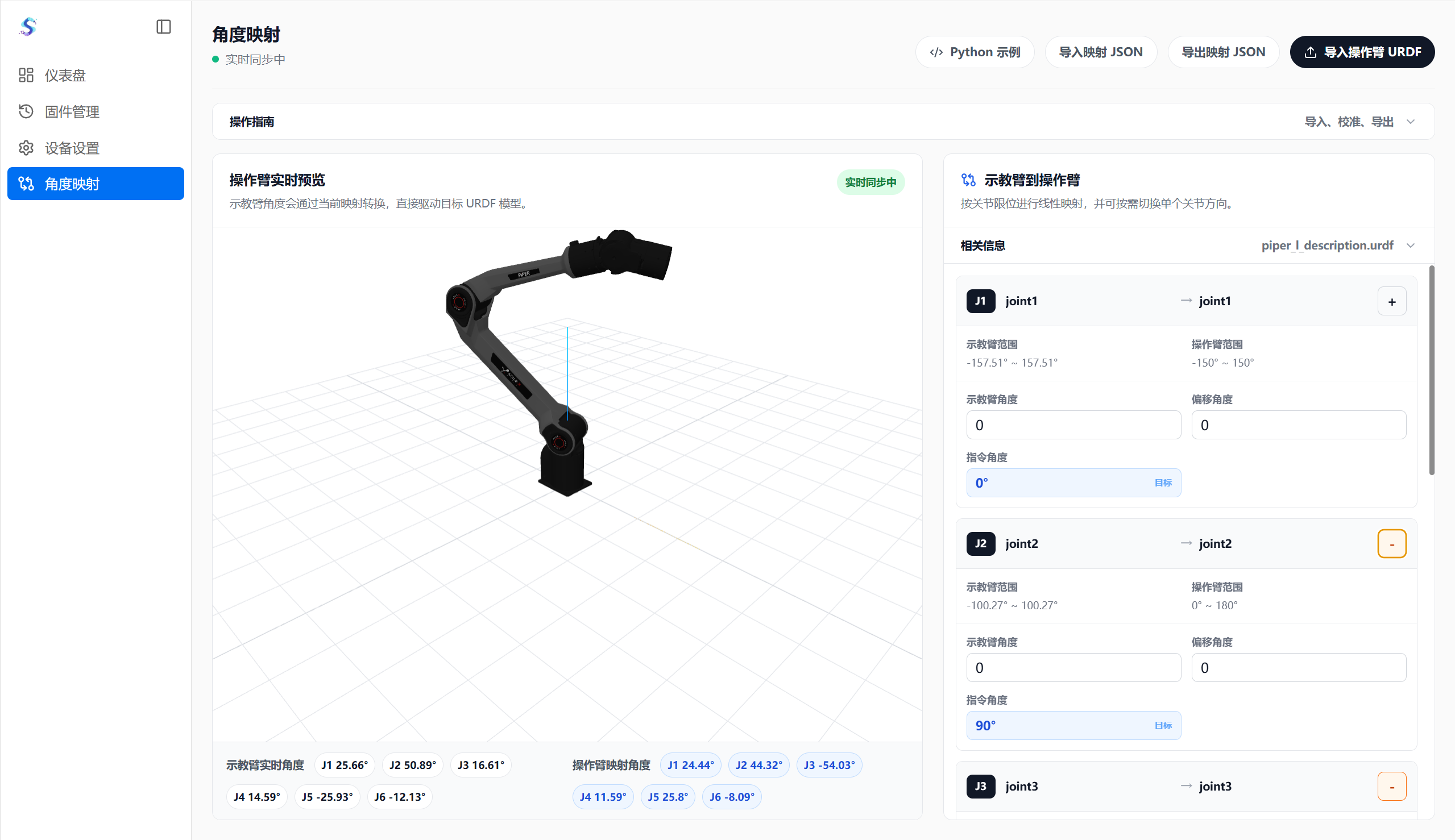
角度映射(Angle Mapping)
角度映射页用于配置示教臂到操作臂的关节角度映射关系:
- 实时预览操作臂 URDF 模型姿态。
- 查看示教臂实时角度与操作臂映射角度。
- 按关节配置线性映射关系,支持调整偏移角度。
- 支持通过关节配置卡片中的
+ / -调整示教臂与操作臂的运动方向关系。 - 支持导入 / 导出映射 JSON,便于复用映射配置。
- 支持导入操作臂 URDF,用于校准和预览目标模型。
- 提供 Python 示例,方便在开发场景中复用映射逻辑。
页面顶部会显示当前同步状态,便于判断示教臂数据是否正在实时驱动目标模型。
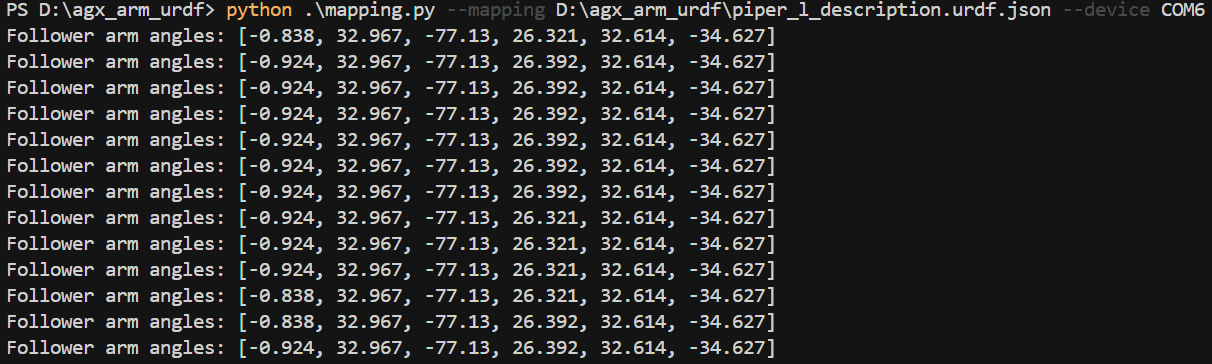
Python 示例可配合导出的映射 JSON 使用,适合接入 Aloha 构型的机械臂。运行示例脚本时,传入映射文件路径和设备串口,即可读取示教臂数据,并持续输出映射后的操作臂角度。开发时可将这些角度数据接入操作臂 SDK,快速搭建自定义遥操流程。