Complete Kit · Teleoperate Out of the Box
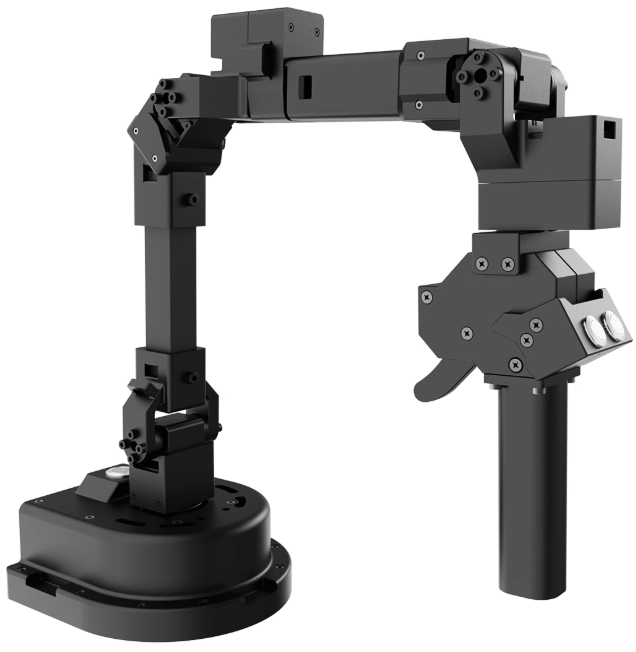
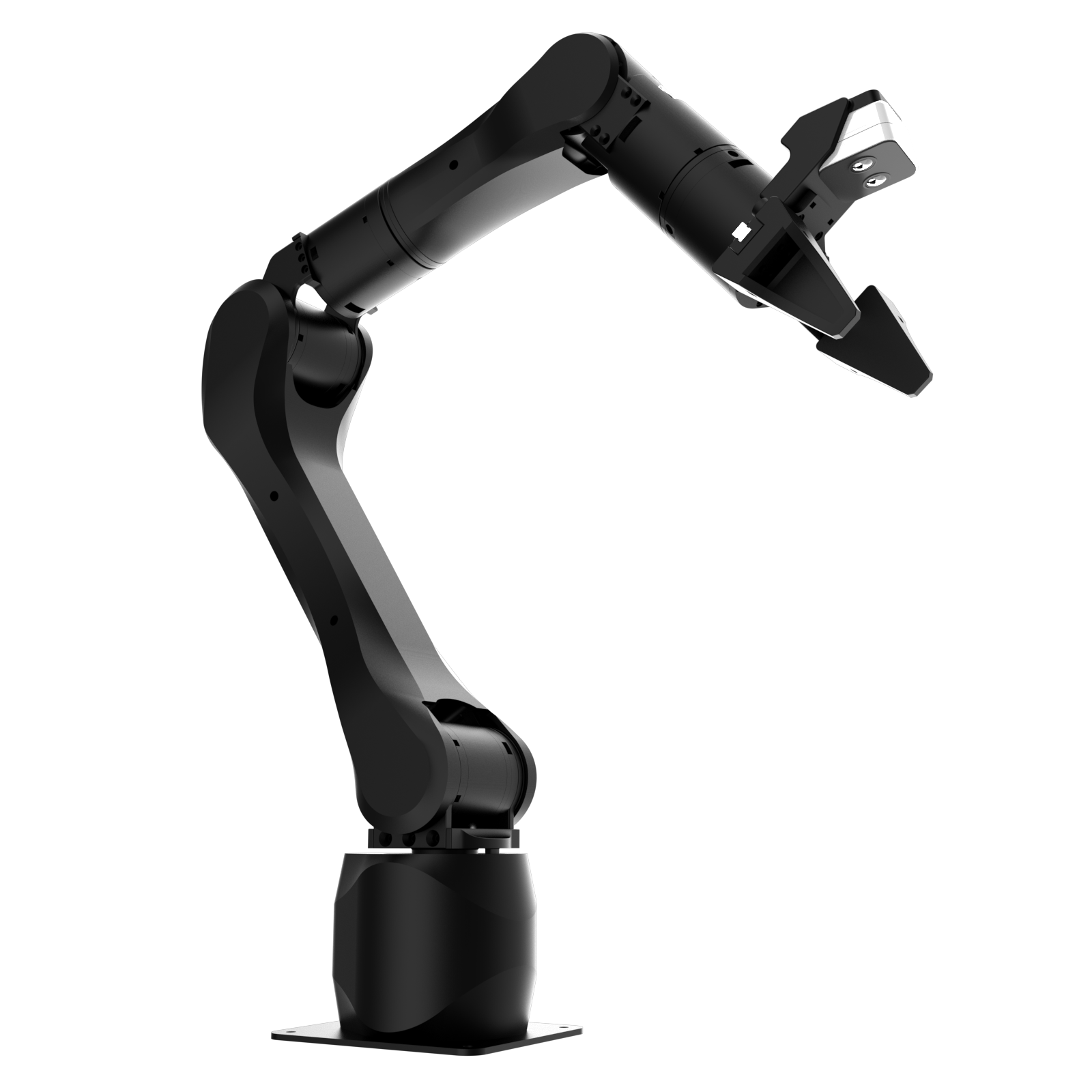
Alicia-M Teleop KitAlicia-M Teleop Kit
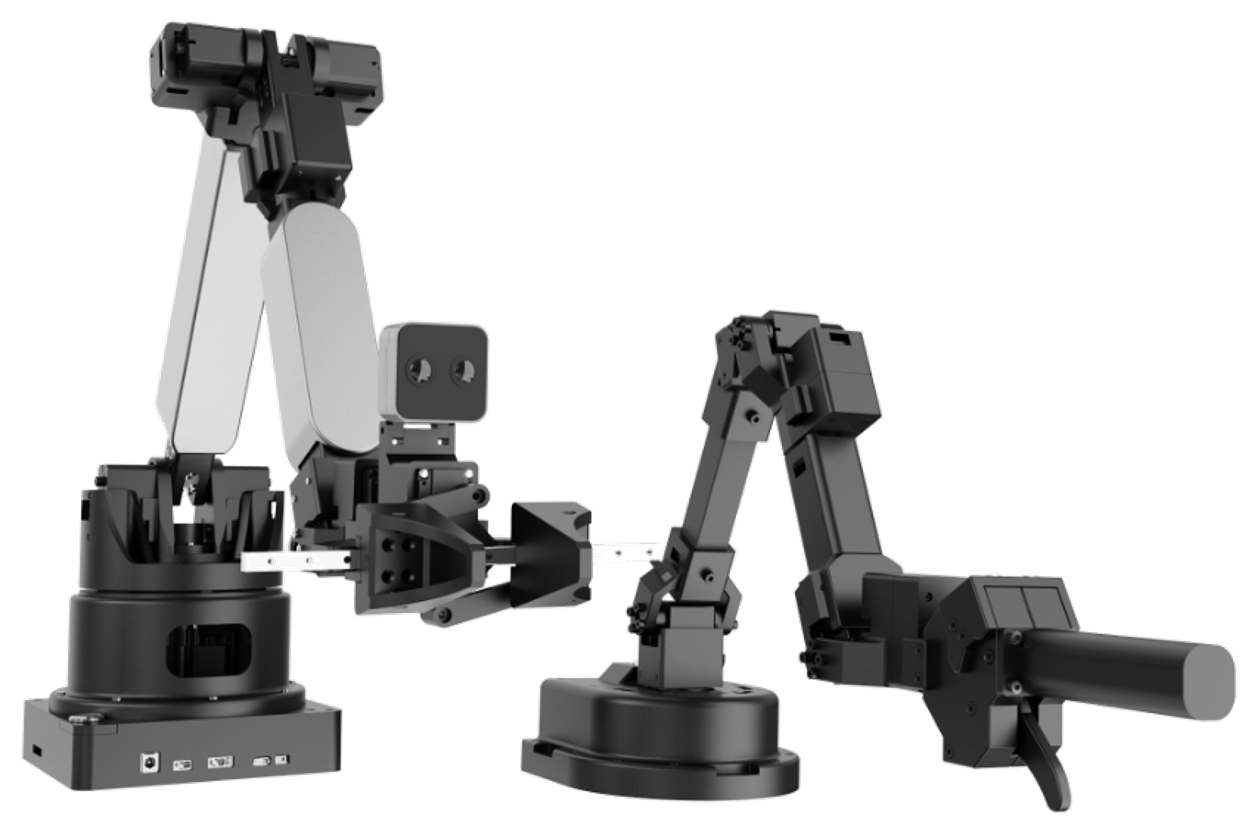
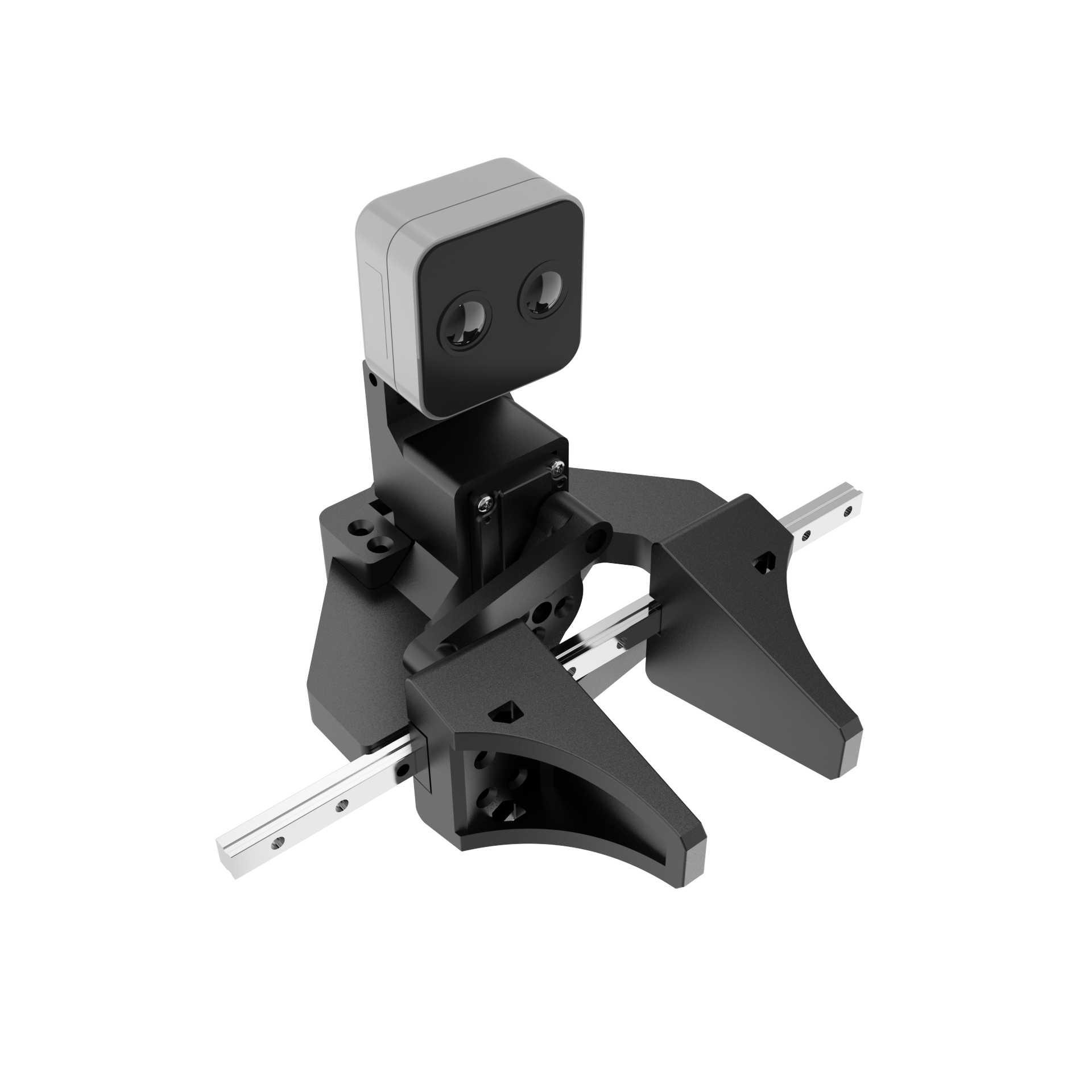
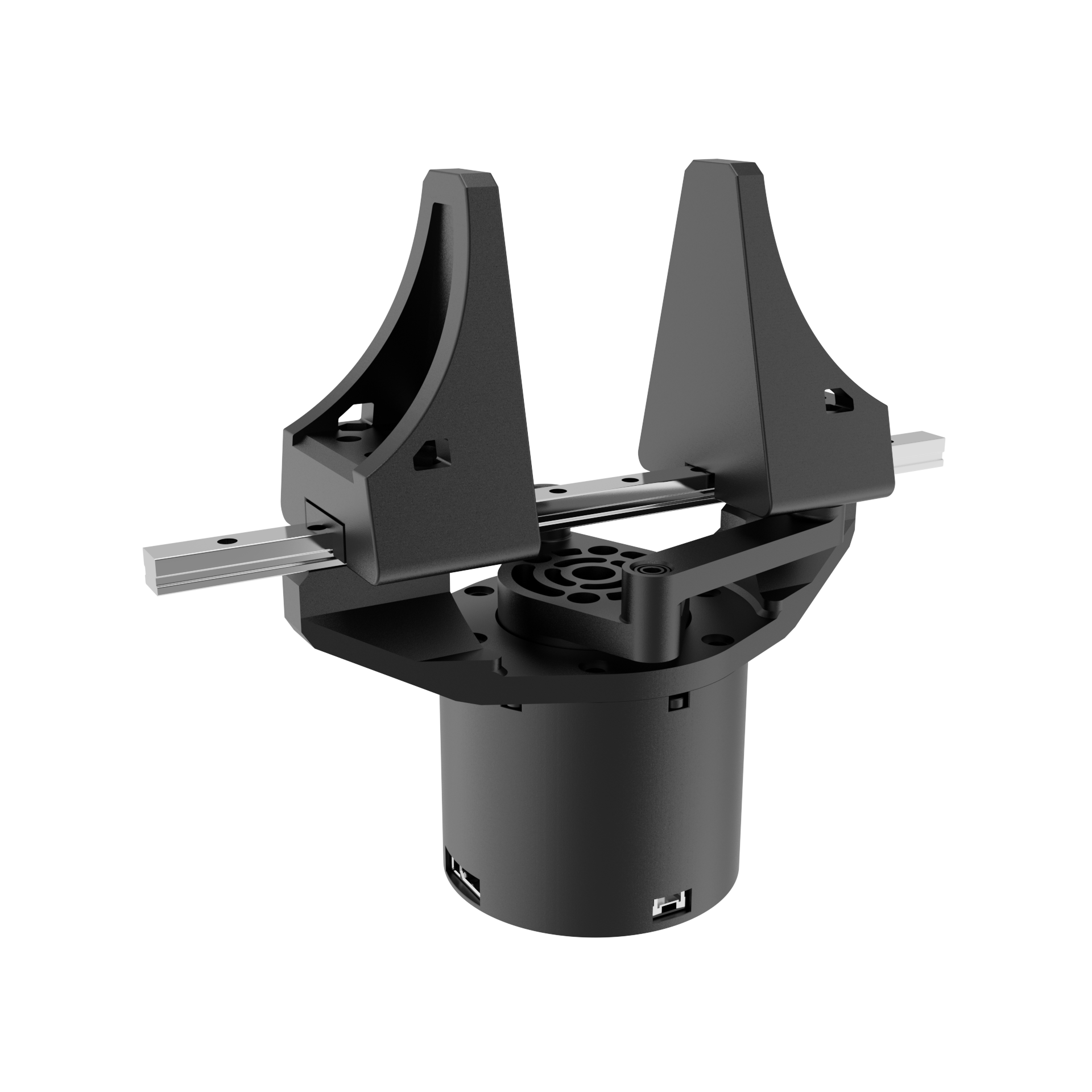
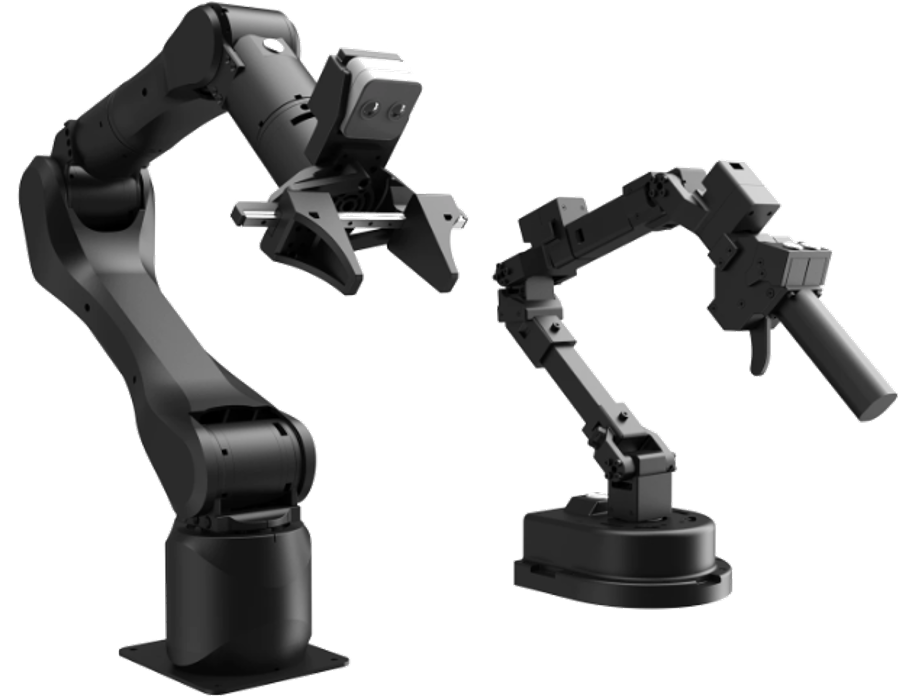
Alicia-M leader-follower teleoperation kit including the operator arm and a matching teach pendant — teleoperate and capture imitation-learning data right out of the box.
- Alicia-M Dual Arms
- Matching Teach Pendant
- Teleoperate Out of the Box