Alicia-D Leader-Follower Teleoperation Series
The Alicia-D Teleoperation Robotic Arm Series is an embodied-intelligence platform designed for AI education and industrial scenarios, composed of a follower arm and a leader arm. Through advanced teleoperation coordination algorithms, the motion of the leader arm can be precisely mapped to the follower arm, making it an ideal entry-level platform for robotic-arm control, imitation learning, and end-to-end large-model (VLA) research.
Specifically:
-
The follower arm adopts a standard 6-degree-of-freedom design, with an arm reach of up to 650 mm, and supports an optional high-definition camera. Its core components are Synria's in-house serial bus servos and aviation-grade mechanical assemblies, ensuring high stability and reliability of the system. The standard version has a rated end payload of 500 g, while the high-power version reaches a rated end payload of 1000 g.
-
The leader arm shares a consistent structural design with the follower arm and is equipped with a dedicated trigger and control buttons, supporting high-precision motion capture and teleoperation control.
The teleoperation system integrates the professional Synria SparkMind Embodied-Intelligence Algorithm Platform, achieving a high degree of integration between vision, control, and mechanical systems, and supporting coordinate control, motion planning, collision detection, and more. Combined with the Sparkling online learning platform, it provides systematic courses covering robotic-arm simulation, forward/inverse kinematics, vision algorithms, imitation learning, and more. As a professional-grade platform aimed at education and research, the Alicia-D series balances ease of use and extensibility in both software and hardware design, and is fully open source, supporting secondary development. It comes with detailed tutorials and professional technical support, building an ideal platform for practice and innovation for learners of AI and embodied intelligence.
1. Product Components List
-
Follower arm: refers to the robotic arm with a gripper, used to perform specific actions such as grasping and moving.
-
Leader arm: refers to the handheld robotic arm operated by the user, used to record and transmit motion in teleoperation or teaching scenarios.
-
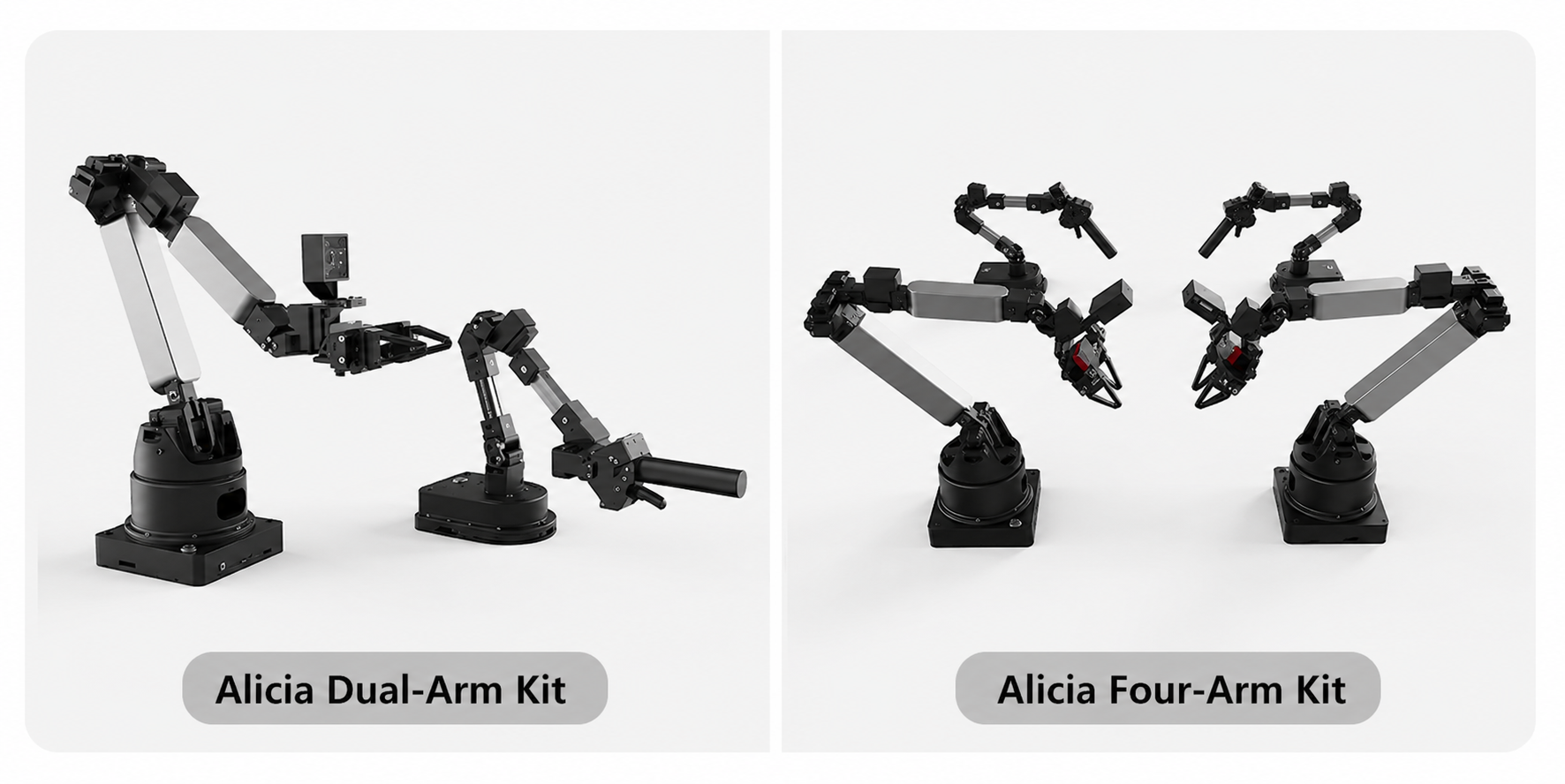
Kit configurations:
-
Alicia Dual-Arm Kit: includes 1 leader arm + 1 follower arm (supports single-hand teleoperation);
-
Alicia Quad-Arm Kit: includes 2 leader arms + 2 follower arms (supports two-hand coordinated teleoperation).
-
2. Kit Dimension Parameters

