虚拟遥操作MuJoCo
1. 介绍
本文档介绍如何使用 灵动Alicia-DL示教臂真机 对 MuJoCo 中的虚拟操作臂 进行遥操作。该方案适用于以下场景:
- 在没有实体操作臂时,先完成遥操作流程验证
- 调试示教臂输入、夹爪映射与控制逻辑
- 快速开发 MuJoCo 仿真场景、模型和交互逻辑
- 作为后续接入真实操作臂前的联调环境
遥操作工具包为 Teleoperation-SDK,其中提供两个开箱即用的示例:
| Demo | 功能 |
|---|---|
01_demo_realtime_joint_plot.py | 实时关节角度绘图与手柄输入状态显示 |
02_demo_mujoco_follower.py | 示教臂到 MuJoCo 虚拟操作臂的遥操作 |
2. 使用效果
运行后将同时涉及两个输入输出通道:
- 输入端:灵动Alicia-DL示教臂真机通过 USB 串口向电脑发送实时关节角度和手柄状态
- 仿真端:MuJoCo 加载虚拟操作臂模型,并按照示教臂姿态实时更新显示
操作流程如下:
- 连接示教臂与电脑,确认系统已经正确识别串口设备,
- 启动 MuJoCo 遥操作实例,等待仿真窗口完成加载,
- 在仿真窗口中观察虚拟机械臂的初始姿态,确认模型显示正常,
- 按住左键启用遥操作;如需固定示教臂真机,可按住右键进行锁定,
- 缓慢拖动示教臂,观察虚拟操作臂是否能够同步响应,
- 通过扳机控制夹爪开合,检查夹爪映射是否正常。
首次联调时,建议先运行 01_demo_realtime_joint_plot.py 确认串口读取和按键状态正常,再启动 02_demo_mujoco_follower.py 进入三维仿真。
3. 环境要求
| 项目 | 要求 |
|---|---|
| 操作系统 | Ubuntu 20.04 / 22.04,推荐 Ubuntu |
| Python | 3.10 - 3.12,推荐 3.11 |
| 硬件 | 灵动Alicia-DL示教臂,USB 串口连接 |
| GPU | 可选。仅影响 torch 的安装方式 |
虽然 Python 依赖在部分 Windows 环境下也可能安装成功,但针对 MuJoCo 虚拟遥操作的完整链路验证,仍建议使用 Ubuntu 环境,以减少图形界面、串口权限和依赖兼容性问题。
4. 项目结构
Teleoperation-SDK 主要目录如下:
Teleoperation-SDK/
├── 01_demo_realtime_joint_plot.py
├── 02_demo_mujoco_follower.py
├── assets/
│ └── mujoco/
│ └── Alicia_D_v5_6/
│ └── gripper_50mm/
│ ├── alicia_d_follower.xml
│ ├── base_link.STL
│ ├── link1.STL ~ link6.STL
│ ├── left_gripper_50mm.STL
│ └── right_gripper_50mm.STL
├── teleop_utils/
│ ├── __init__.py
│ └── fps_utils.py
├── pyproject.toml
├── LICENSE
├── .gitignore
└── README.md
其中:
02_demo_mujoco_follower.py是本文的核心示例assets/mujoco/.../alicia_d_follower.xml是默认加载的 MuJoCo 模型描述文件teleop_utils/fps_utils.py提供高精度循环定时能力,用于稳定控制频率
5. 安装配置
5.1 安装 Conda
如您尚未安装 Conda,请先参考官方安装说明:
安装完成后,请重新打开终端,确认以下命令可正常使用:
conda --version
5.2 获取代码并创建环境
git clone https://github.com/Synria-Robotics/Teleoperation-SDK.git
cd Teleoperation-SDK
conda create -n teleop python=3.11 -y
conda activate teleop
5.3 安装方式
方法一:源码安装
适用于需要修改源码、查看实现细节或参与二次开发的场景。
pip install -e .
方法二:PyPI 安装
适用于直接使用 SDK 的场景。
pip install teleoperation-sdk
- 需要调试、改代码、替换模型或扩展遥操作逻辑时,建议使用
pip install -e . - 仅运行官方示例时,可使用 PyPI 安装
5.4 依赖验证
安装完成后,建议执行以下命令检查关键依赖是否齐全:
python -c "
import torch, numpy, matplotlib, mujoco, alicia_d_sdk, serial
print('torch ', torch.__version__)
print('numpy ', numpy.__version__)
print('matplotlib ', matplotlib.__version__)
print('mujoco ', mujoco.__version__)
print('alicia_d_sdk OK')
print('pyserial OK')
print()
print('All dependencies installed successfully!')
"
如果上述输出全部正常且无报错,说明运行环境已经具备。
5.5 串口权限配置
首次在 Linux 上使用时,请先为当前用户添加串口访问权限:
sudo usermod -aG dialout $USER
执行后请 注销并重新登录,否则权限不会立即生效。
若未完成此步骤,运行时可能出现以下报错:
Permission denied: '/dev/ttyACM0'
6. 快速开始
6.1 运行前检查
启动前请确认:
- 已激活正确的 Conda 环境
- 示教臂已通过 USB 连接到电脑
- 当前终端对串口具有访问权限
- MuJoCo 图形界面可以正常打开
6.2 先检查示教臂输入是否正常
建议先运行实时监控脚本:
python 01_demo_realtime_joint_plot.py
运行后将弹出 matplotlib 窗口,显示:
- 6 个关节的实时角度曲线
- 手柄输入状态
- 当前采样更新情况
如果该示例无法正常读取姿态或按键状态,请先解决串口、权限或依赖问题,再进行 MuJoCo 遥操作。
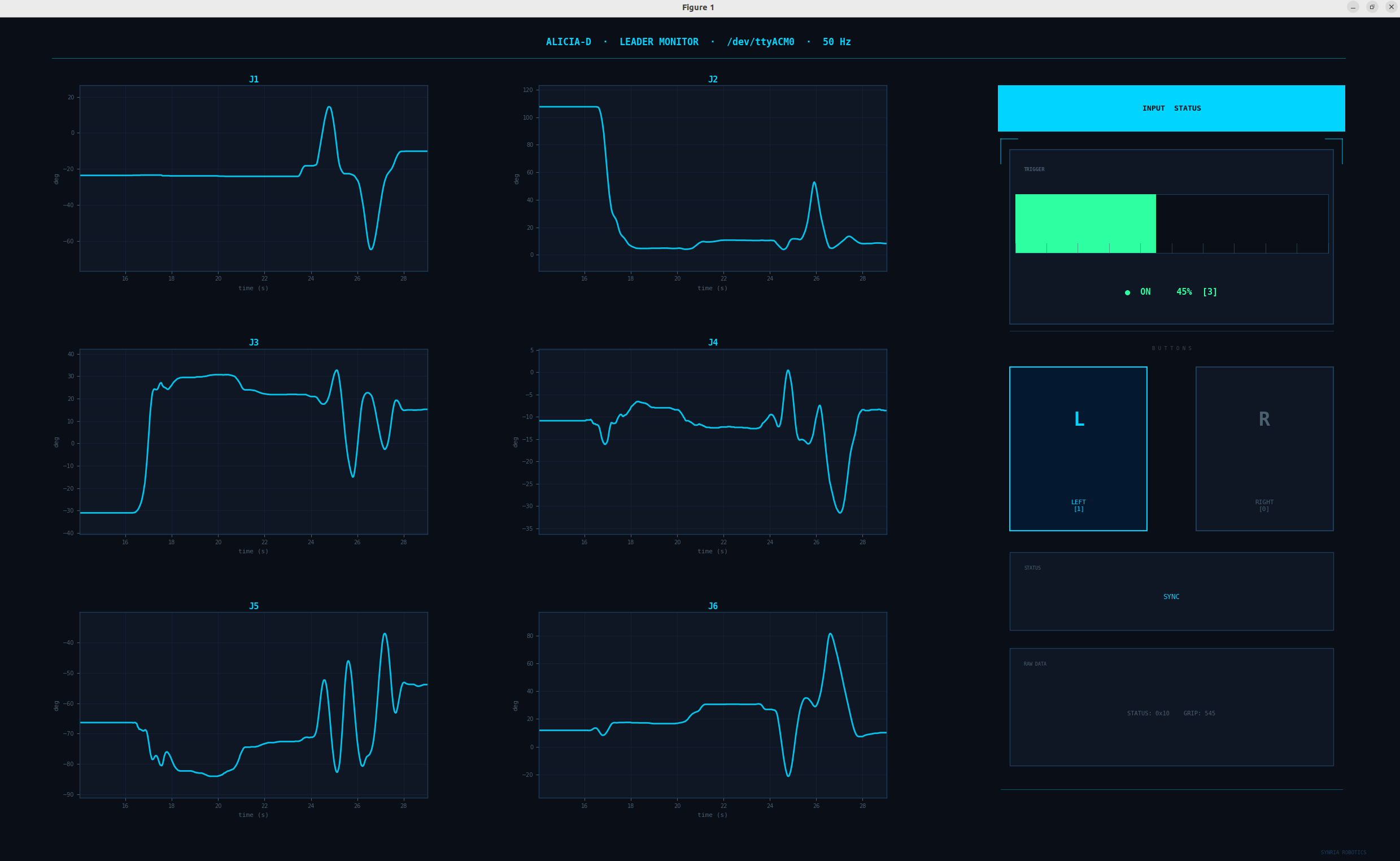
实例01界面
6.3 启动 MuJoCo 虚拟遥操作
python 02_demo_mujoco_follower.py
正常情况下,将弹出 MuJoCo 三维窗口,并加载内置虚拟操作臂模型。此时示教臂的动作会被持续读取,但只有在满足交互条件时才会驱动虚拟机械臂执行遥操作。
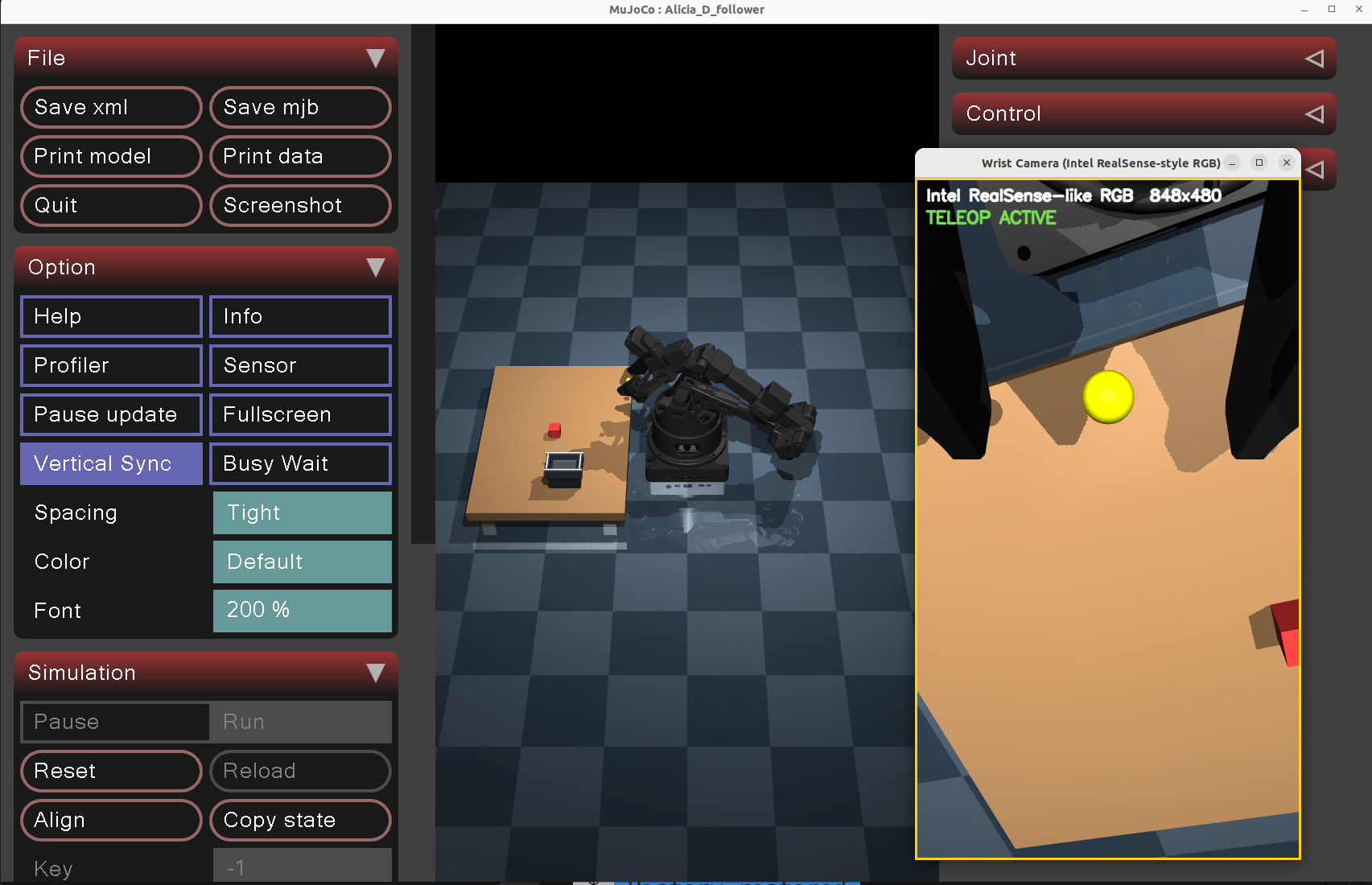
实例02界面
7. 交互说明
7.1 基本操作
| 操作 | 效果 |
|---|---|
| 左键 | 启用/切断遥操作 |
| 邮件 | 锁住示教臂真机 |
| 扳机 | 控制夹爪开合幅度 |
按 R | 重新加载 MuJoCo XML 模型 |
| 关闭窗口 | 退出程序 |
7.2 推荐操作习惯
- 启动程序后,先确认窗口正常显示,再开始移动示教臂
- 启用遥操作前,先让示教臂处于较自然、较安全的姿态
- 首次使用时,建议缓慢移动各关节,确认映射方向与幅度正常
- 修改 XML 或 mesh 后,优先使用
R重载进行验证
8. 常见问题
8.1 启动时报依赖错误
| 报错信息 | 原因 | 解决方法 |
|---|---|---|
ImportError: torch_utils 需要 PyTorch | 未安装 torch | 在仓库目录执行 pip install . 或 pip install -e . |
ModuleNotFoundError: No module named 'torch' | 未安装 torch | 同上 |
ModuleNotFoundError: No module named 'mujoco' | 未安装 MuJoCo Python 包 | 重新执行安装步骤 |
ModuleNotFoundError: No module named 'alicia_d_sdk' | SDK 未安装 | 重新执行安装步骤 |
Permission denied: '/dev/ttyACM0' | 串口权限不足 | 参考上文串口权限配置 |
device disconnected or multiple access on port | 设备未连接或串口被占用 | 检查 USB 连接并关闭其他占用程序 |
8.2 不连接机械臂能否运行 MuJoCo Demo
可以启动程序,也通常能打开 MuJoCo 窗口,但由于没有可用的示教臂输入,终端会持续打印串口相关错误,且无法控制虚拟机械臂。
如果您的目标只是检查 XML 场景渲染是否正常,这种方式仍可用于静态验证。
8.3 --variant 支持哪些选项
支持以下选项:
leadergripper_50mmgripper_100mmleader_urvertical_50mm
当您切换硬件形态或夹爪规格时,请确保参数设置与实际设备一致。
8.4 为什么建议先运行 Demo 01
因为 Demo 01 更容易定位问题来源:
- 如果 Demo 01 无法读取关节角度,通常是串口、权限或 SDK 安装问题
- 如果 Demo 01 正常,但 Demo 02 异常,问题通常集中在 MuJoCo 环境、模型文件或图形界面
这能显著缩短排障时间。
9. 依赖关系说明
Teleoperation-SDK
├── numpy
├── matplotlib
├── mujoco >= 3.0
├── pyserial
└── alicia_d_sdk
└── synria-robocore
└── torch
其中:
numpy用于数值计算matplotlib用于实时曲线显示mujoco用于三维仿真与模型加载pyserial用于串口通信alicia_d_sdk用于读取示教臂状态并接入遥操作逻辑torch由下游依赖间接引入,因此某些场景下即使未直接使用深度学习功能,也仍需正确安装
10. 推荐调试流程
如果您是首次接触该工具链,建议按以下顺序完成调试:
- 安装 Conda 与 Python 环境
- 通过
pip install -e .安装 Teleoperation-SDK - 执行依赖验证命令
- 连接示教臂,确认串口号正确
- 运行
01_demo_realtime_joint_plot.py检查关节与按键状态 - 运行
02_demo_mujoco_follower.py打开 MuJoCo 仿真 - 按住左键并缓慢拖动示教臂,确认映射关系正常
- 修改 XML 并使用
R验证场景重载
11. 相关文档
通过以上文档,您可以进一步完成示教臂基础使用、SDK 开发以及第三方机械臂遥操作扩展。