Alicia-D 上位机软件使用
Synria Desk 是 Alicia-D 系列推荐使用的桌面端上位机软件,可用于设备接入、单臂控制、Alicia-DL 示教臂配置、双臂遥操作、URDF 可视化、固件管理和设备参数设置。本文按 Alicia-D 的实际使用路径整理入口,完整功能说明可继续查看 Synria Desk 上位机软件。
功能速览
| 使用场景 | 适用对象 | 主要功能 |
|---|---|---|
| 设备接入 | Alicia-D / Alicia-DL | 扫描设备、查看设备列表、进入控制工作区 |
| 单臂控制 | Alicia-D 操作臂 | 连接、状态查看、自检、复位原点、力矩开关、夹爪与关节控制 |
| 示教臂控制 | Alicia-DL 示教臂 | 状态查看、固件管理、零点设置、角度映射 |
| 远程遥操 | Alicia-D + Alicia-DL | 示教臂端建会话、操作臂端加入会话、摄像头画面同步 |
| SparkVis 可视化 | Alicia-D / 自定义 URDF | 3D 姿态查看、关节控制、笛卡尔控制、轨迹规划 |
下载、安装与设备接入
请先根据操作系统安装 Synria Desk。下载入口见 下载与安装,支持 Windows、macOS、Linux amd64 与 Linux arm64。Linux 用户安装后可在应用菜单中打开,也可以在命令行运行 synria-desk。
安装完成后,将 Alicia-D 操作臂或 Alicia-DL 示教臂通过 USB 连接到电脑,并确认设备已上电。进入首页后点击“扫描设备”,软件会列出当前可接入设备,并根据设备类型进入对应工作区。
- Alicia-D 操作臂:进入单臂控制工作区。
- Alicia-DL 示教臂:进入示教臂或双臂控制相关工作区。
- 设备入口与首页说明见 首页与设备入口。
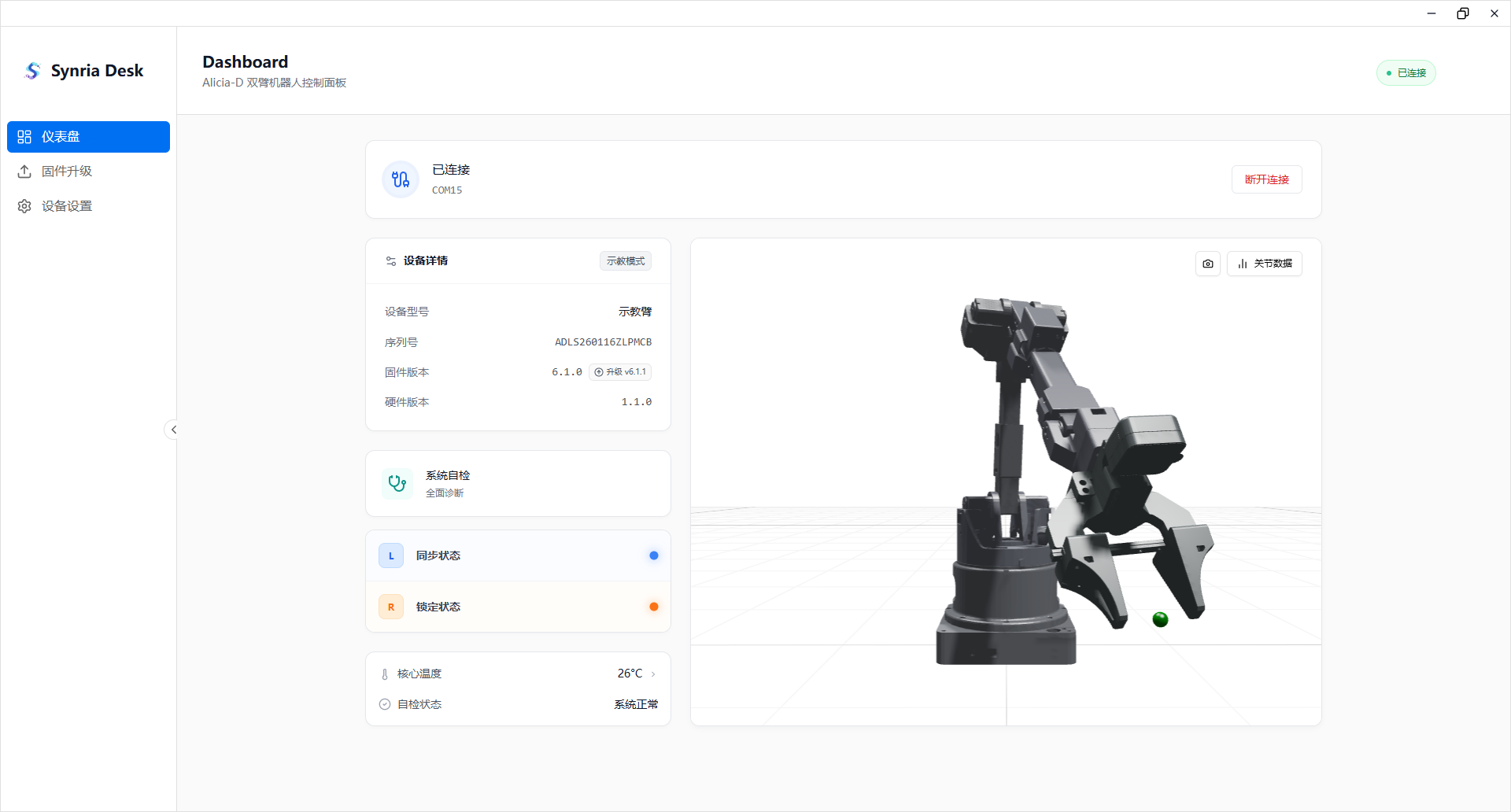
Alicia-D 操作臂:仪表盘与基础控制
选择 Alicia-D 操作臂后,仪表盘用于完成连接检查和基础动作验证。这里适合第一次接入设备、确认固件版本、检查夹爪和关节状态。
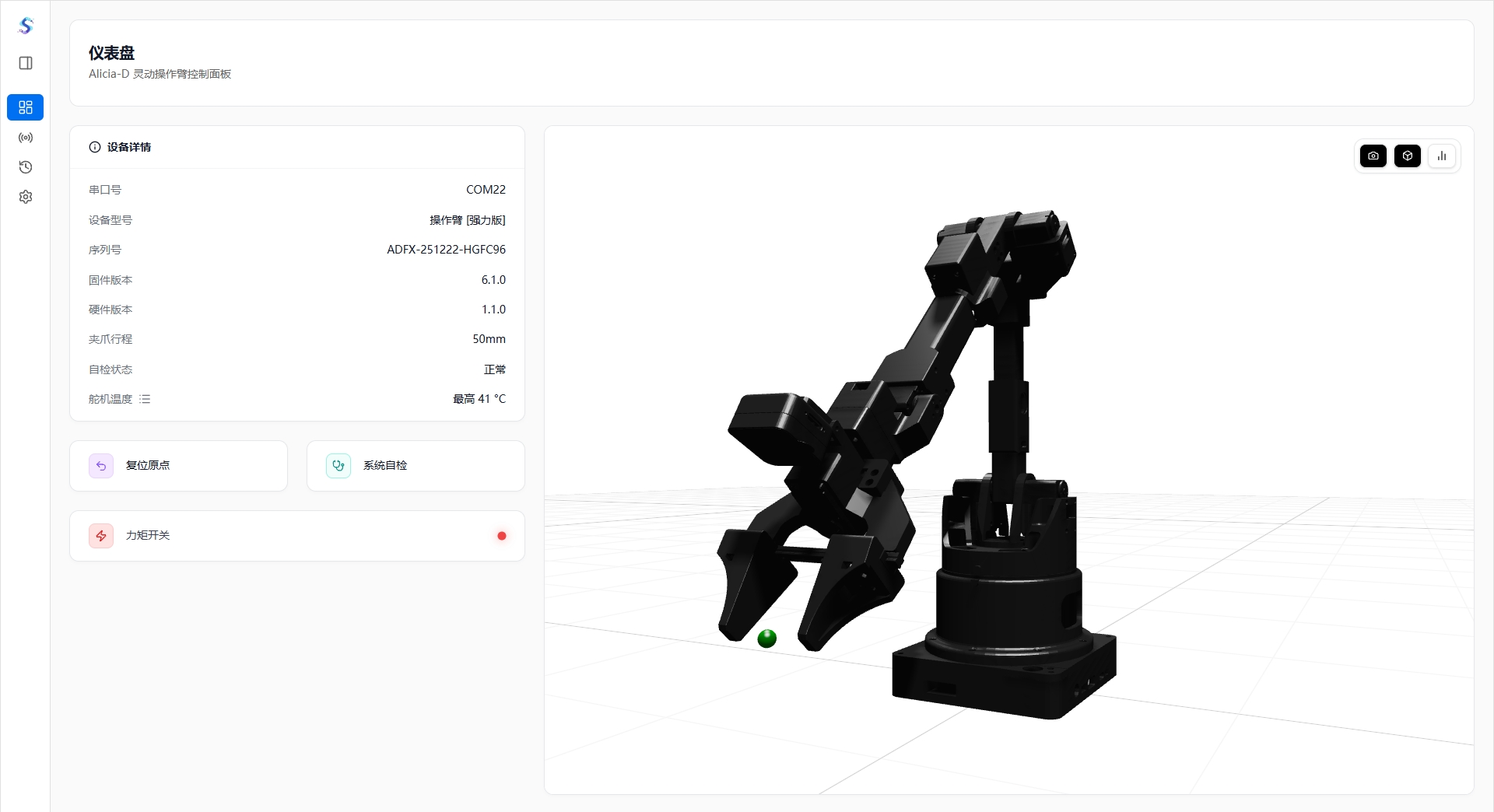
常用操作包括:
- 查看连接状态、设备型号、序列号、固件版本、硬件版本和夹爪信息。
- 执行连接 / 断开、系统自检、复位原点。
- 查看关节温度 / 电机温度,异常时根据提示处理。
- 控制 Alicia-D 力矩开启和关闭,便于拖动示教或恢复执行状态。
- 进入固件管理页面检查更新、查看版本历史并执行升级。
完整说明见 单臂控制。
SparkVis:3D 可视化与运动控制
SparkVis 用于查看机械臂 3D 姿态,并通过图形界面完成关节、笛卡尔空间和轨迹规划控制。它适合在写 SDK 程序前先验证机械臂动作范围、末端姿态和轨迹效果。
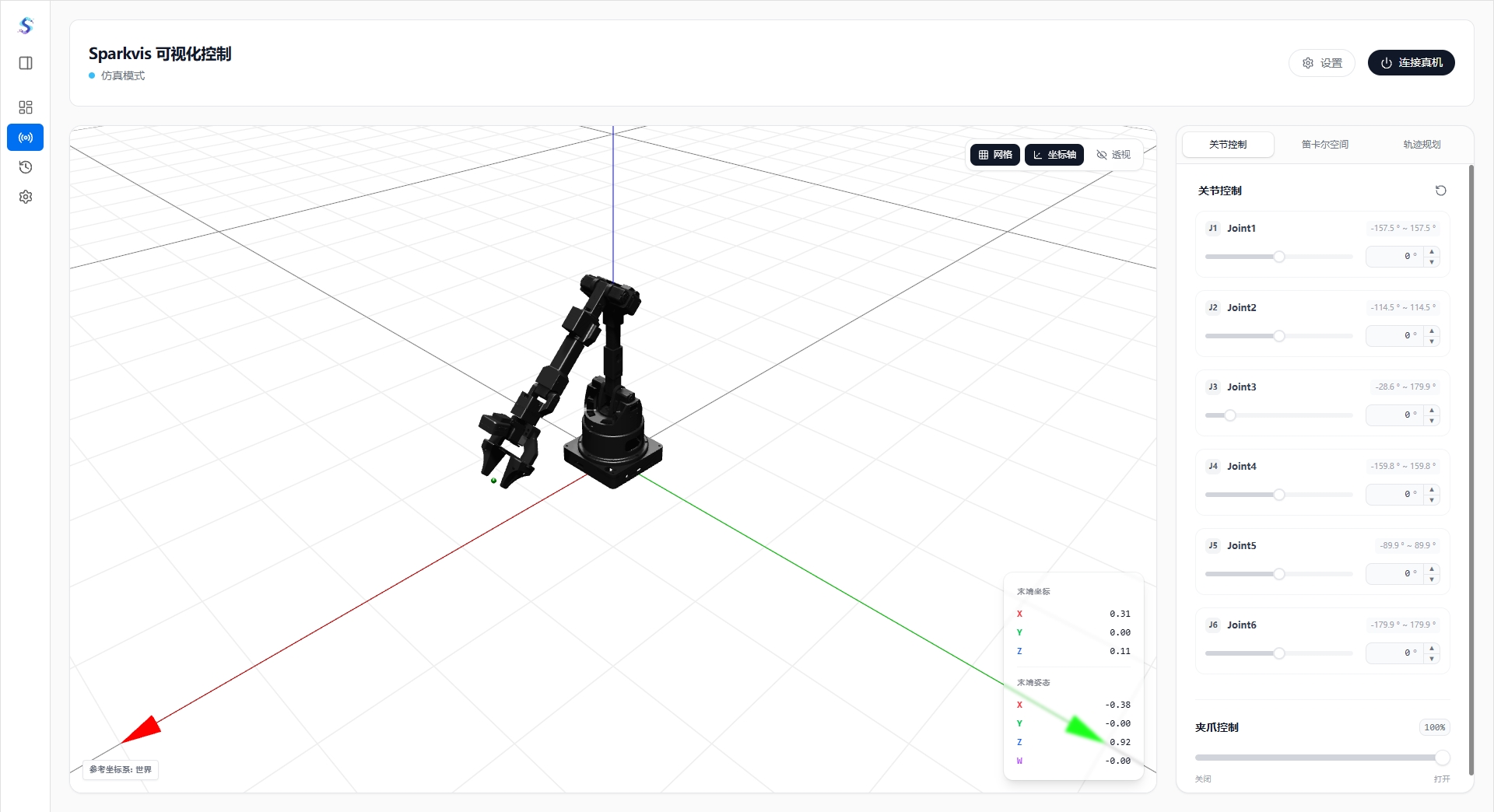
可使用的能力包括:
- 查看末端位置、末端姿态、世界 / 本地坐标系和机械臂模型。
- 通过滑块或输入框调整关节角度和夹爪开合。
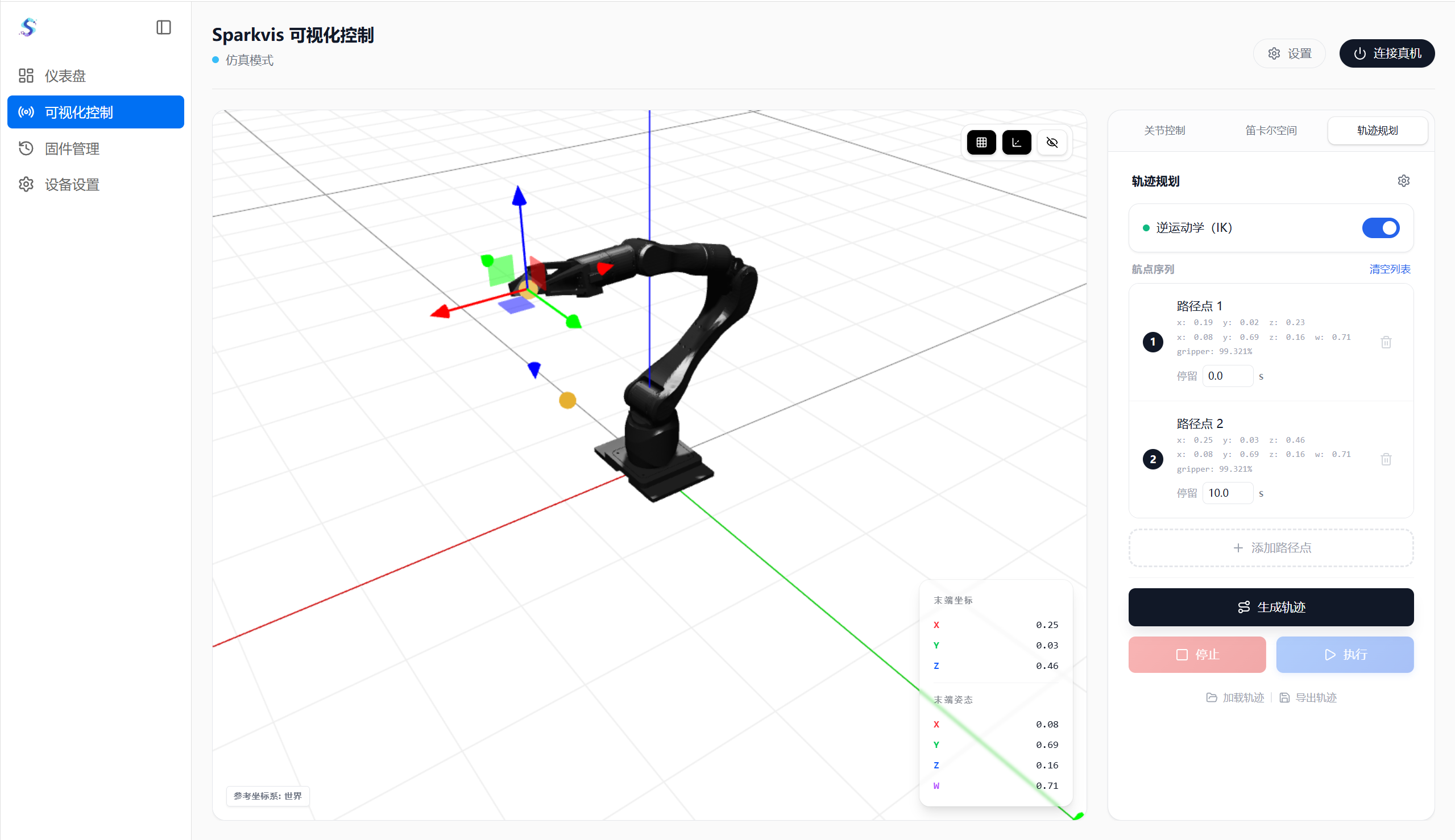
- 开启 IK 控制后,在笛卡尔空间中调整末端平移和旋转。
- 添加路径点、生成轨迹、执行 / 暂停 / 停止轨迹,并导入或导出轨迹文件。
- 载入预置 Alicia-D 模型或本地
.urdf文件进行模型验证。
自定义模型与 URDF 使用见 自定义 URDF 与可视化。
Alicia-DL 示教臂:双臂控制与角度映射
选择 Alicia-DL 示教臂后,可进入示教臂控制工作区。该工作区主要用于状态总览、固件维护、设备设置和示教臂到操作臂的角度映射。
角度映射页用于把示教臂关节角转换为目标操作臂关节角,是自定义遥操和 Aloha 构型接入中最常用的配置页面。
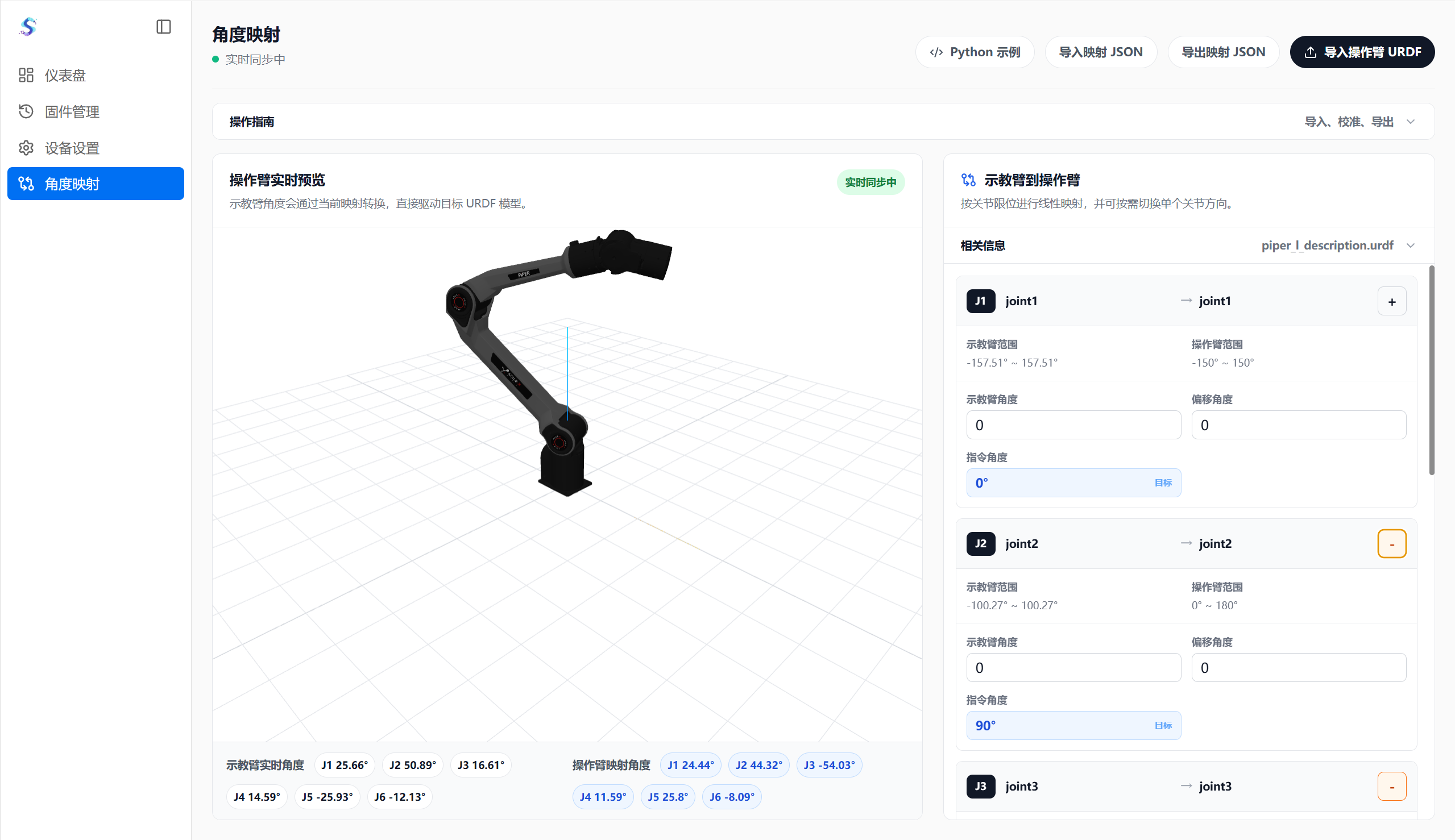
建议按以下方式使用:
- 在仪表盘确认示教臂连接状态、设备信息、版本信息和同步状态。
- 在设备设置中完成零点设置,必要时进入固件管理检查版本。
- 在角度映射页查看示教臂实时角度和操作臂映射角度。
- 按关节调整映射方向和偏移角度。
- 导入或导出映射 JSON,便于在后续遥操或 SDK 程序中复用。
完整说明见 双臂控制。
远程遥操:示教臂端与操作臂端
Synria Desk 支持将 Alicia-DL 示教臂动作实时传递给 Alicia-D 操作臂,并同步摄像头画面。远程遥操由示教臂端创建频道,操作臂端通过频道 ID 加入。

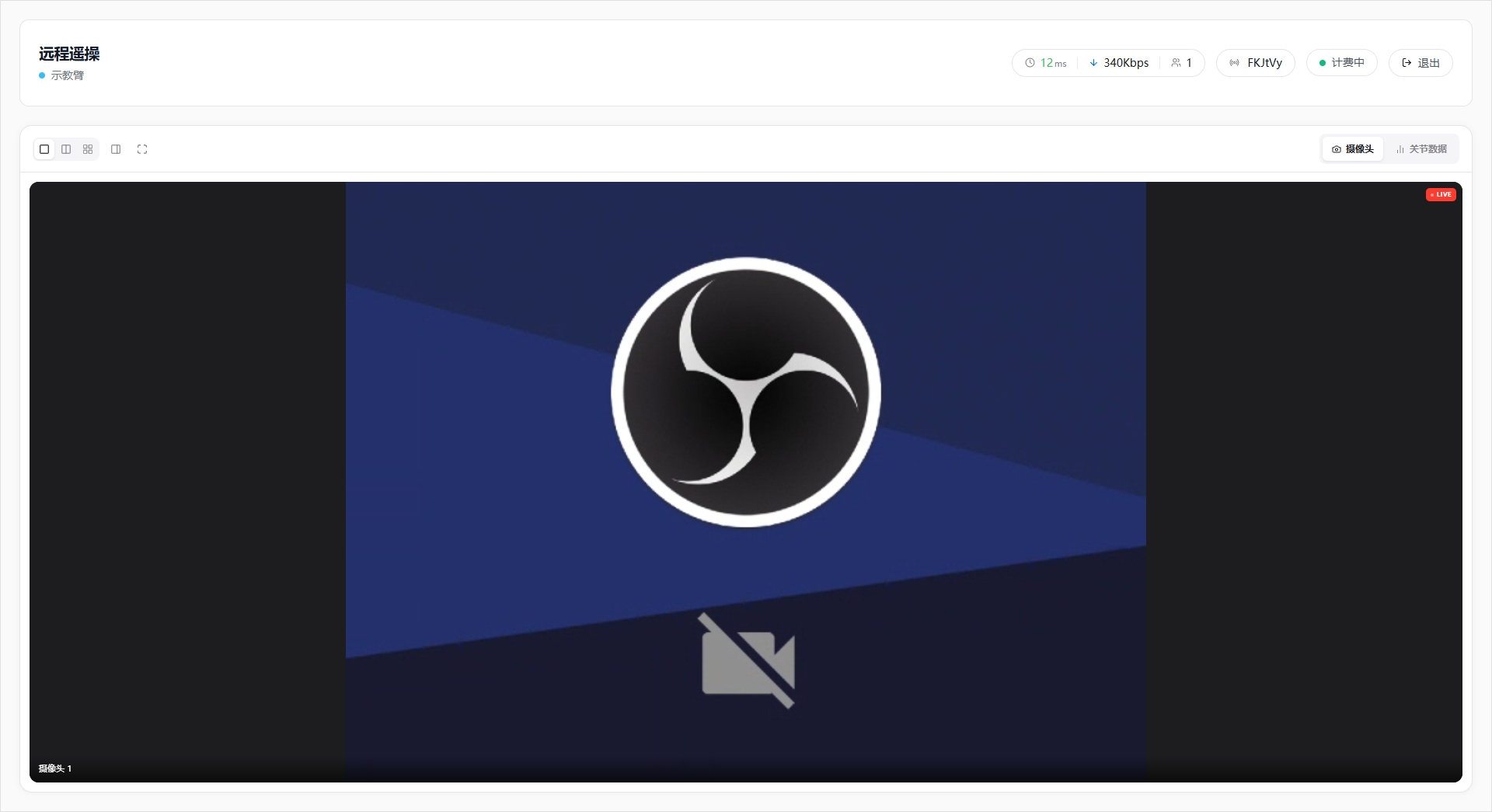
典型流程:
- 示教臂端选择 Alicia-DL,分配左臂 / 右臂,并配置摄像头方案。
- 软件创建遥操频道,并显示频道 ID、网络 RTT、下行带宽、在线人数和计费状态。
- 操作臂端输入频道 ID,选择 Alicia-D 操作臂和本地摄像头。
- 会话建立后,操作臂实时接收示教臂关节数据并执行。
- 在会话中查看左右臂关节角、夹爪状态和摄像头画面,必要时调整执行速度或断开连接。
完整说明见 远程遥操。
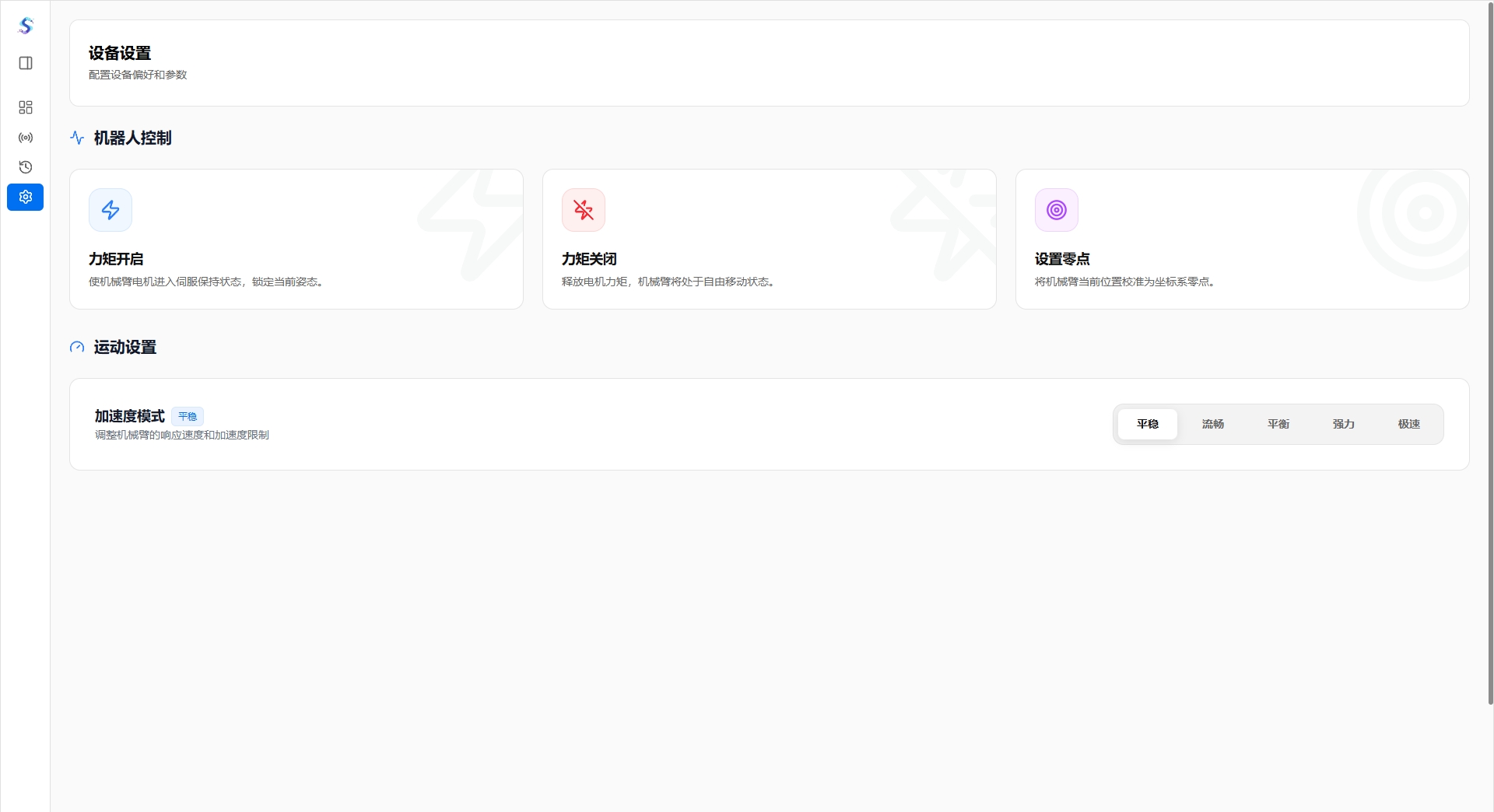
固件管理与设备设置
固件管理页面用于检查当前固件版本、查看版本历史、执行升级或回滚。设备设置页面用于零点设置、运动响应模式调整,以及 Alicia-D 力矩相关控制。
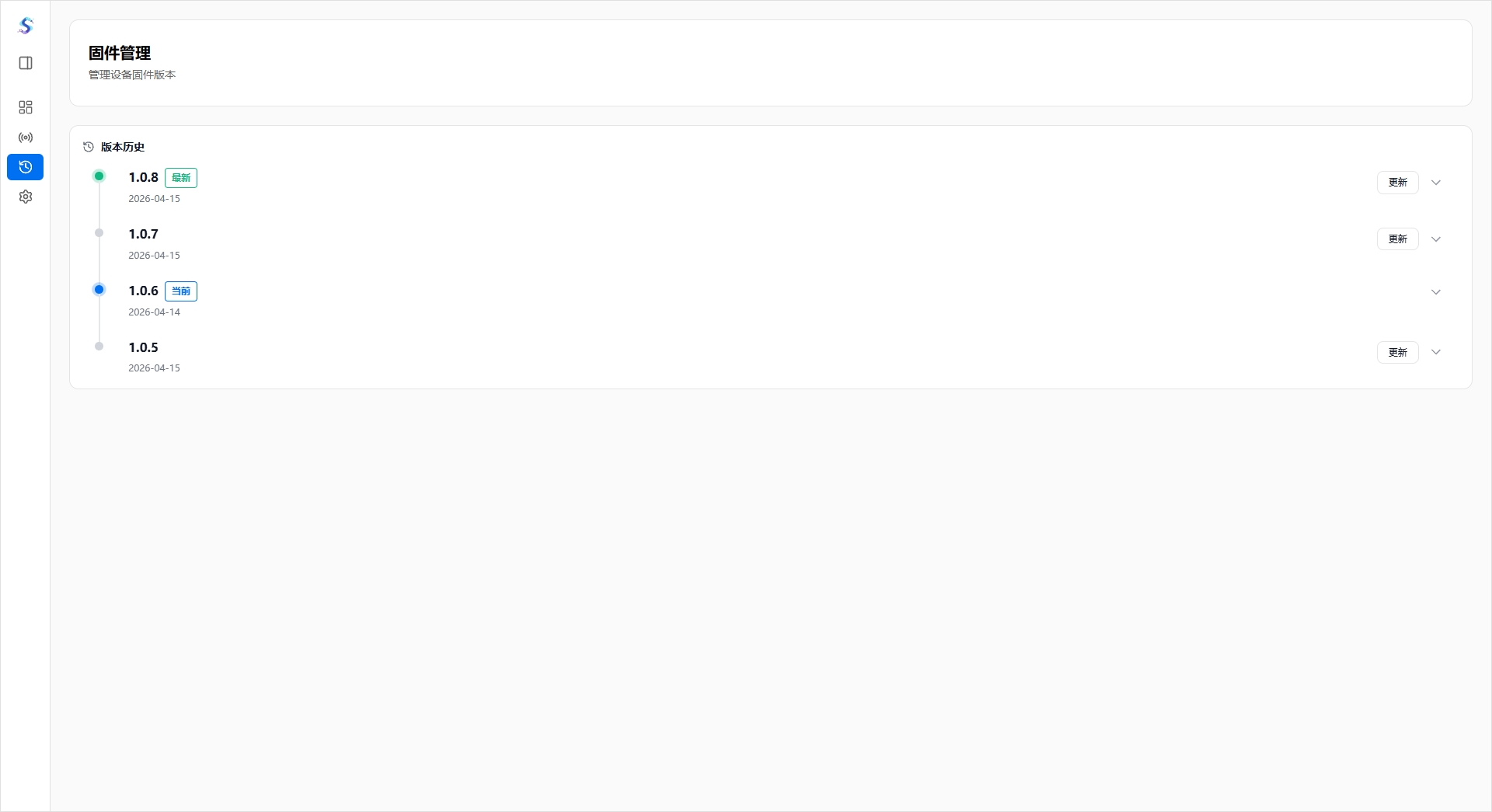
建议在这些场景中优先使用上位机:
- 新设备首次接入,需要确认固件、硬件、夹爪和温度状态。
- 调试前需要复位原点或设置零点。
- 需要快速验证关节、夹爪、轨迹和遥操链路。
- 需要把界面导出的映射或轨迹配置接入 Python SDK 程序。
需要自动化控制、批量实验或二次开发时,再结合 Alicia-D Python SDK 使用。