Installation and Usage Guide
1. Interface and Button Descriptions
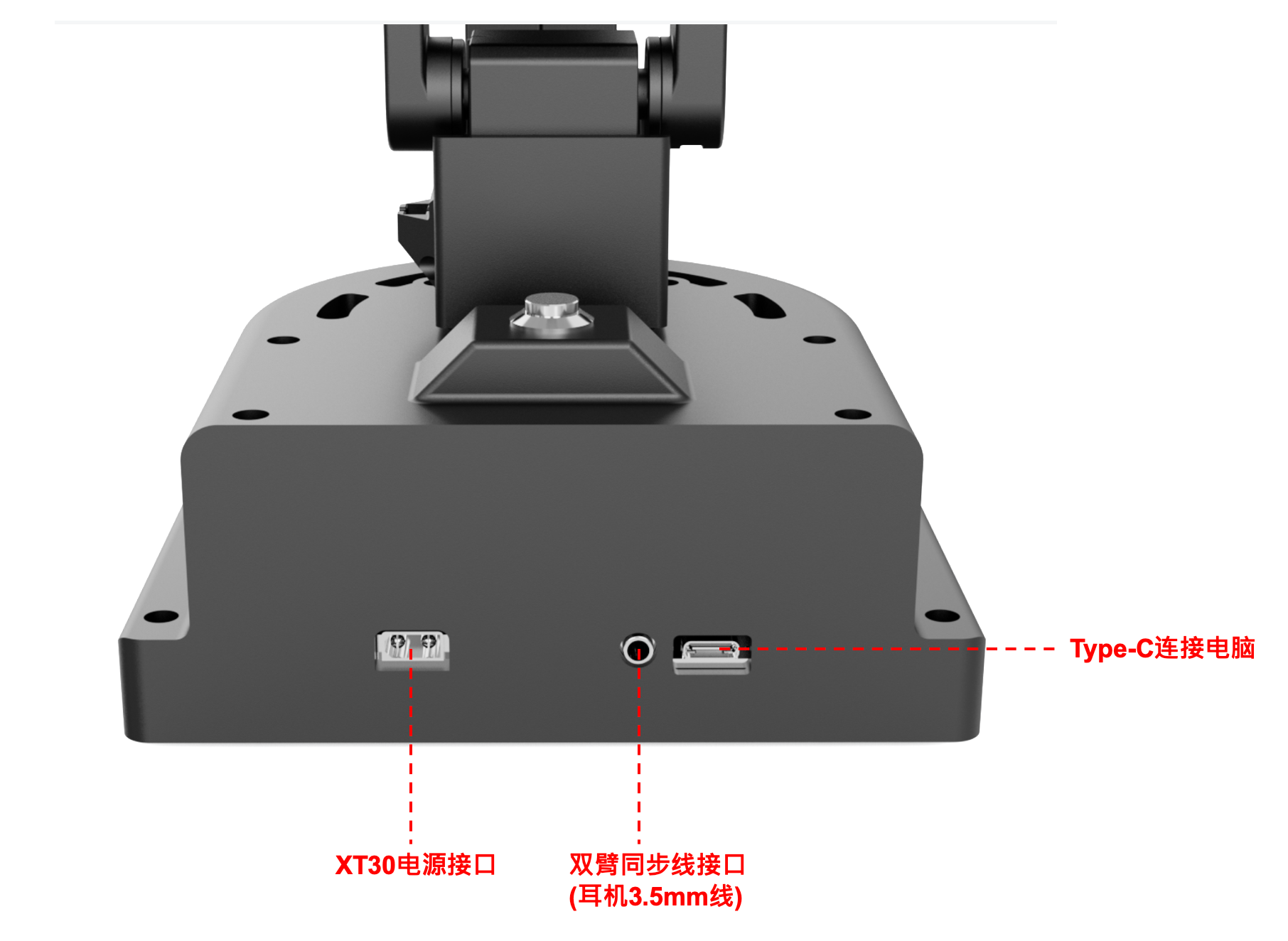
The figure below shows the descriptions of the interfaces on the follower arm base plate:

The figure below shows the descriptions of the interfaces on the teaching arm base plate:
The figure below shows the buttons on the teaching arm grip, including:
-
Teleoperation sync switch button: Used to control the teleoperation connection state between the teaching arm and the follower arm. When turned on, the teaching arm can synchronously control the follower arm's motions in real time; when turned off, the teleoperation function is disconnected and the teaching arm can no longer control the follower arm;
-
Pose lock/unlock button: Used to switch the free-movement state of the teaching arm. When unlocked, the teaching arm is in a force-released state and can be manually guided by the operator; when locked, the teaching arm's pose is fixed and cannot be moved arbitrarily;
-
Gripper open/close control trigger: Pressing this trigger controls the opening and closing of the gripper at the end of the follower arm, enabling grasping or releasing operations.

2. Follower Arm Unboxing and Assembly Tutorial
Keep the follower arm in its usage pose, fix it to the edge of the table with a C-clamp, and wait for use.
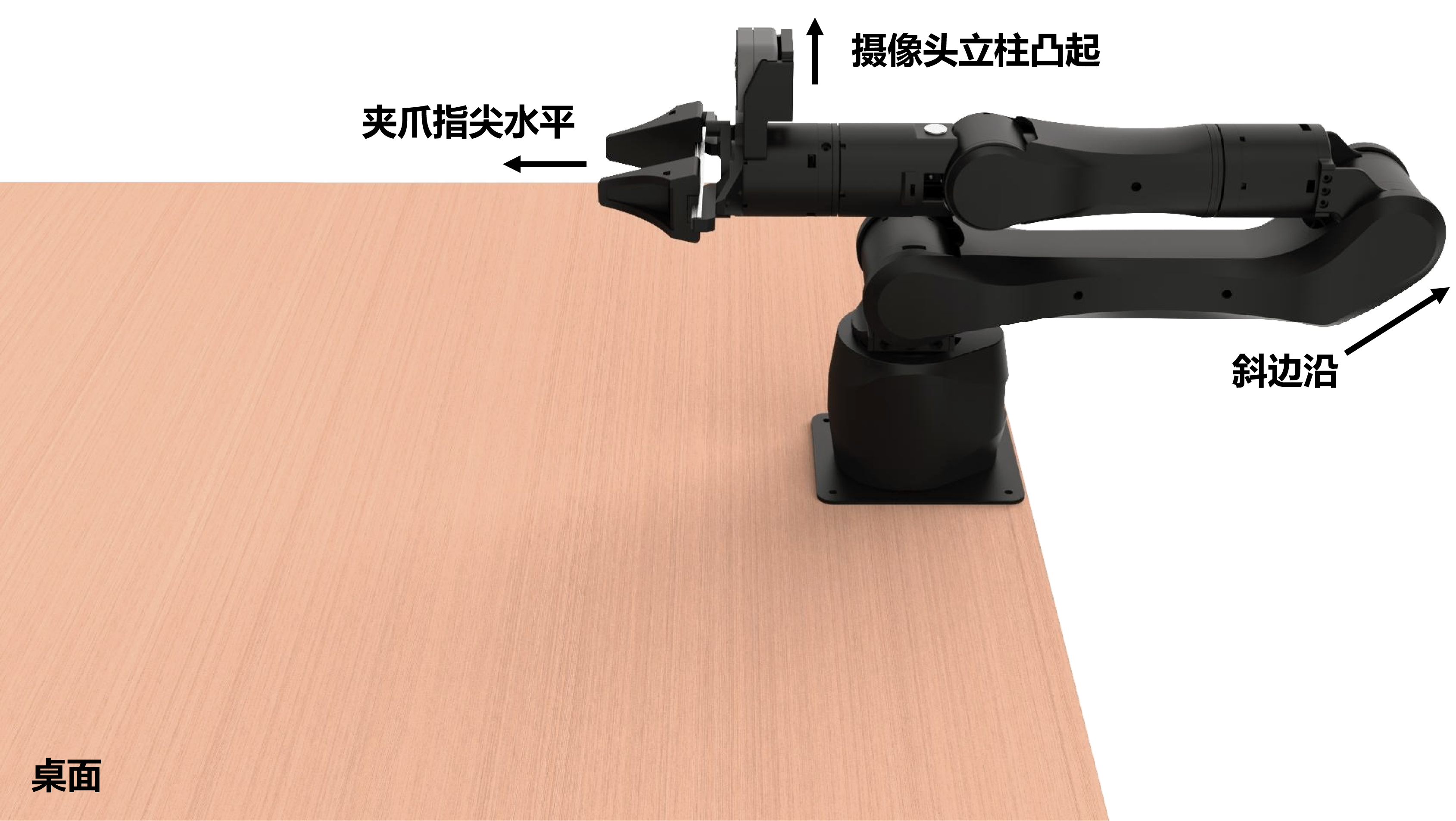
- Before each use, the follower arm must be adjusted to the usage pose and ready to operate. It is strictly forbidden to start the device in any other pose, to prevent personal injury or product damage;
3. Teaching Arm Unboxing and Assembly Tutorial
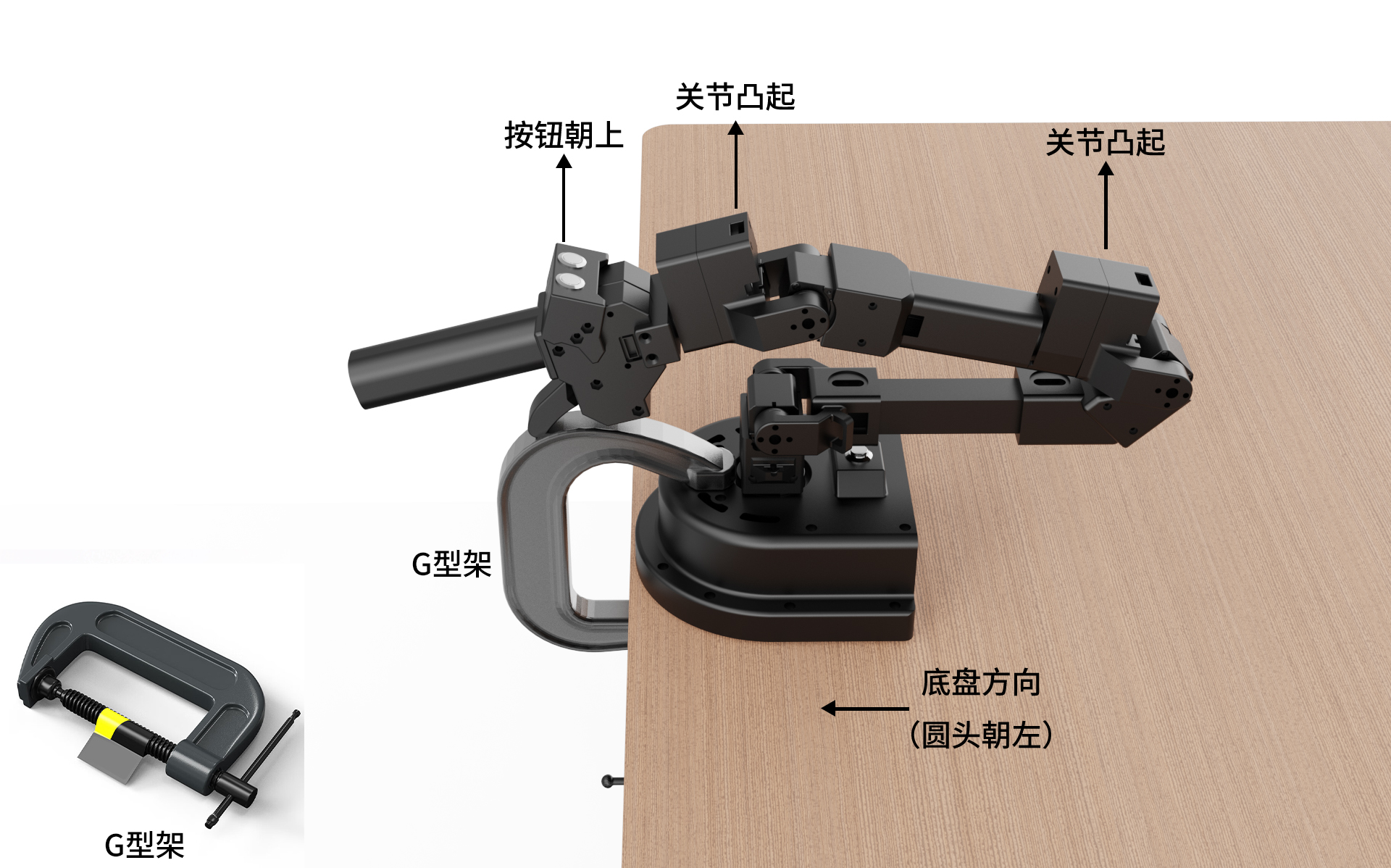
After taking out the teaching arm, lay it flat on the table, adjust it to the factory zero-point pose, fix it to the table, and keep it ready for operation.
-
Before each use, the teaching arm must be adjusted to the usage pose and ready to operate. It is strictly forbidden to start the device in any other pose, to prevent personal injury or product damage;
-
Users can make an auxiliary judgment by observing the protrusion direction of the two joints and the orientation of the grip buttons: in the usage pose, the joint protrusions and grip buttons should both face diagonally upward, and the rounded end of the base should face left, ensuring the robotic arm has returned to the correct position.
4. Wiring Methods for the Follower Arm and Teaching Arm
Two connection methods are currently supported, which can be chosen according to the use case.
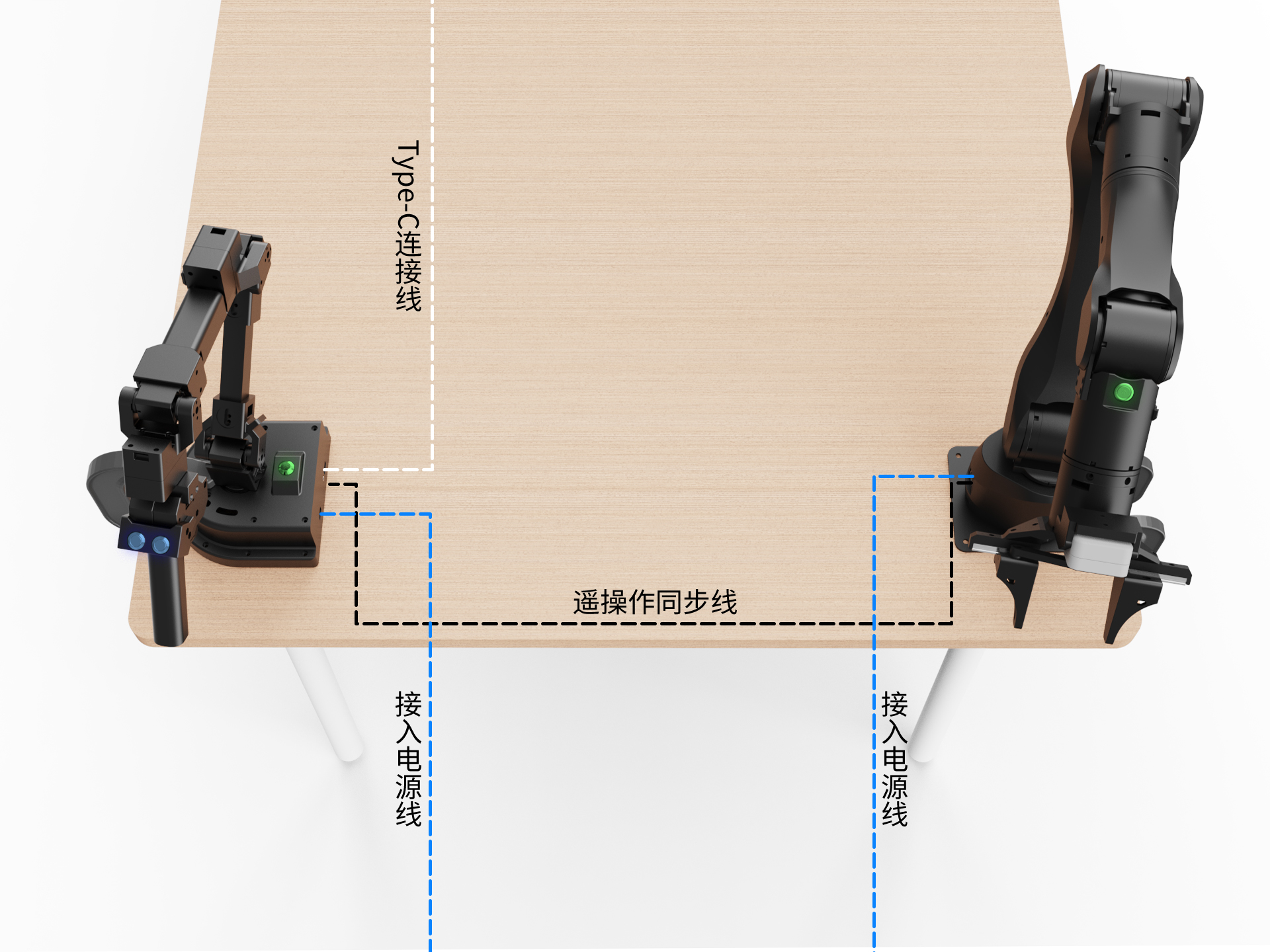
(1) Direct Connection via Teleoperation Sync Cable (No Computer Required)
Directly connect the teaching arm and the follower arm via the teleoperation sync cable. After both arms are individually powered on, teleoperation can begin, without connecting a computer or running any software.
Teaching Arm
- Connect the power cable to the DC power interface of the teaching arm;
- Use the teleoperation sync cable to connect the teaching arm's sync cable interface to the follower arm's sync cable interface.
Follower Arm
- Connect the power cable to the DC power interface of the follower arm.
After powering on, press the teleoperation sync switch button on the teaching arm grip to begin teleoperation.
(2) Connection via Computer (Python SDK Control)
Connect the teaching arm and the follower arm to the computer separately via USB, with teleoperation driven by the Python SDK, supporting richer parameter adjustment and data collection capabilities.
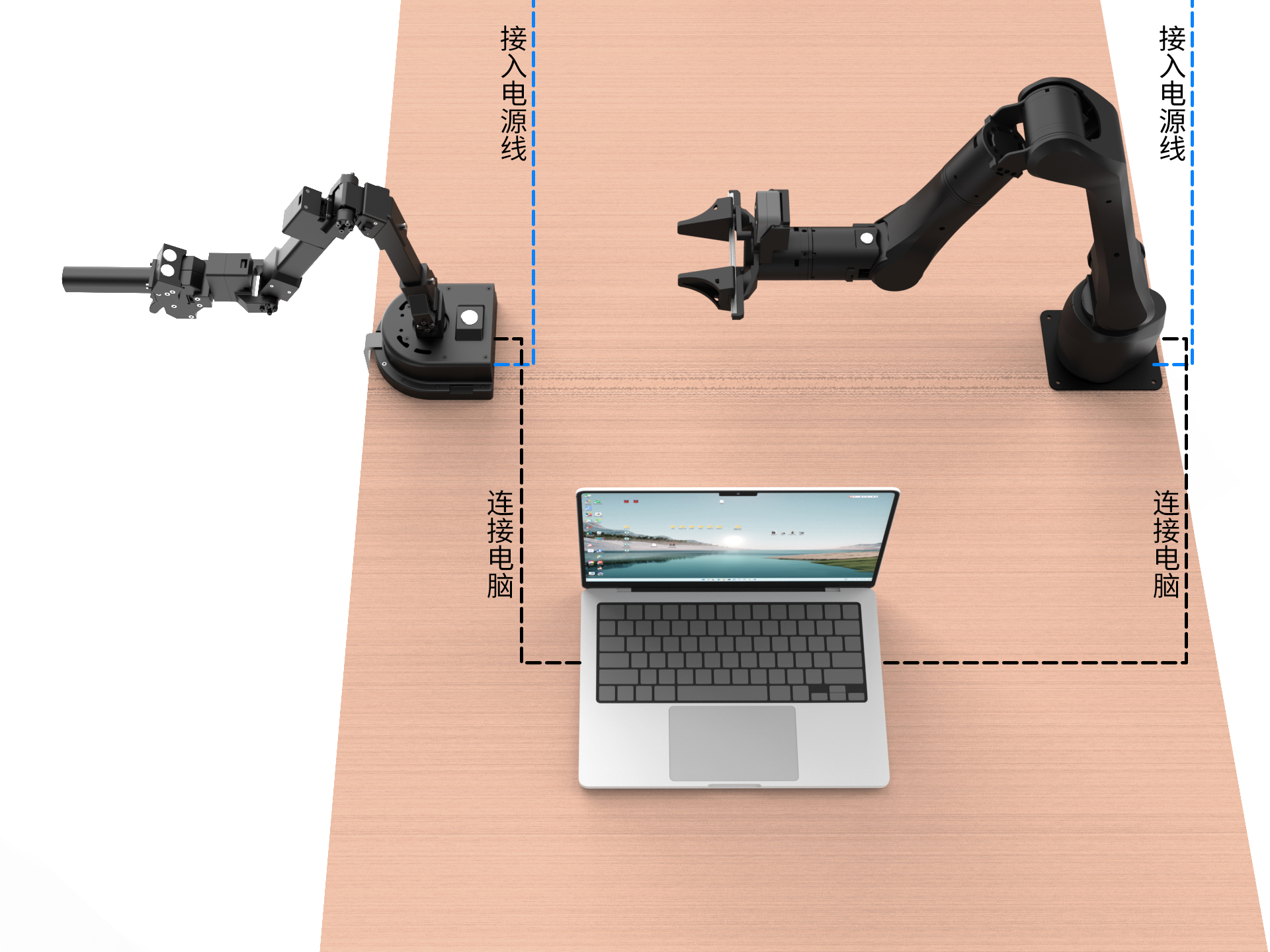
Teaching Arm
- Connect the power cable to the DC power interface of the teaching arm;
- Use a USB-to-Type-C data cable to connect the teaching arm's Type-C interface to the computer's USB interface.
Follower Arm
- Connect the power cable to the DC power interface of the follower arm;
- Use a USB-to-Type-C data cable to connect the follower arm's Type-C interface to the computer's USB interface.
Connect both the teaching arm and the follower arm to the computer to perform dual-arm synchronous control through the computer.
Running the Teleoperation Example
Before running the teleoperation example, first complete the installation and environment configuration of the Synria Python SDK (Alicia-M-SDK).
-
Turn on the power switches of the teaching arm and the follower arm;
-
Set serial port permissions:
sudo chmod 666 /dev/ttyACM*
- Activate the conda environment of Alicia-M-SDK:
conda activate msdk
- Before starting teleoperation, ensure that both the Alicia-M and the Alicia-D are at the zero position (using the factory settings or standard zero point is sufficient; no additional calibration of the teaching arm's zero point is required).
- Before starting teleoperation, hold the Alicia-DL teaching arm and lift it slightly upward, maintaining this posture until entering the teleoperation state.
- To stop teleoperation, first move the Alicia-M close to the zero position, then press Ctrl+C in the terminal to terminate the program.
- Ensure the workspace is safe and avoid collisions of the Alicia-M during teleoperation.
Run the teleoperation example (the version with URDF limit mapping) in the project root directory. For a complete parameter description, see 7.5 Advanced Applications and Device Settings:
python examples/14_demo_teleop_mapped.py --leader-port /dev/ttyACM0 --port /dev/ttyACM1 --mode mit
--leader-port: The serial port of the teaching arm (Alicia-D), default/dev/ttyACM0--port: The serial port of the follower arm (Alicia-M), default/dev/ttyACM1--mode: Control mode, optionspv/mit(defaultmit)--frequency: Control loop frequency (default 100 Hz)--speed: Follower motion speed (0-400, mapped to 0-10 rad/s, default 400, effective for both PV/MIT)--home: Move the Follower to zero before starting (skipped by default)--verbose: Print joint states during teleoperation
Make sure the serial port name matches the actual device, which can be checked via ls /dev/ttyACM*.
- Press Enter to start teleoperation, and dragging the teaching arm will control the follower arm in real time. Press Ctrl+C to stop.
5. Precautions
-
Confirm whether each joint axis of the robotic arm is at the zero position;
-
Check that all cable connections are secure and that the insulation sheathing is intact;
-
Before operating the robotic arm, wear the necessary safety protective equipment according to the actual working environment and operational requirements;
-
Unauthorized modification of the robotic arm is strictly prohibited. The company assumes no responsibility for any malfunction or accident caused by unauthorized modification;
-
Before positioning the robotic arm, be sure to confirm that there are no people or obstacles within its range of motion to prevent collisions or other safety incidents;
-
It is strictly forbidden to use this product in harsh environments, including but not limited to dusty, high-temperature, sun-exposed, flammable, explosive, strongly corrosive, or underwater locations.
-
When operating, keep the speed low and the motions smooth to ensure the safety and controllability of the equipment;
-
Stay focused during operation and anticipate the robotic arm's direction and tendency of motion in advance;
-
Regularly check the operating status of the robotic arm and watch for any abnormal motion or noise;
-
All control commands must keep the robotic arm's range of motion confined within the safe working area; if an out-of-bounds condition occurs, stop operation immediately and cut off the power to prevent personal injury or equipment damage;
-
It is strictly forbidden to cut off power arbitrarily while the robotic arm is running, to avoid causing system failure or unexpected risks;
-
After operation, be sure to return the robotic arm to a safe position;
-
Turn off the power buttons of the follower arm and the teaching arm in sequence. During this process, please support the robotic arm to ensure it remains stable during power-off, preventing mechanical shock or damage;
-
Unplug the power plug and tidy up the cables properly;
-
Store the robotic arm in a dry, room-temperature environment, avoiding damage to the device from moisture, high temperature, or other factors.