安装与使用指南
1. 接口与按钮说明
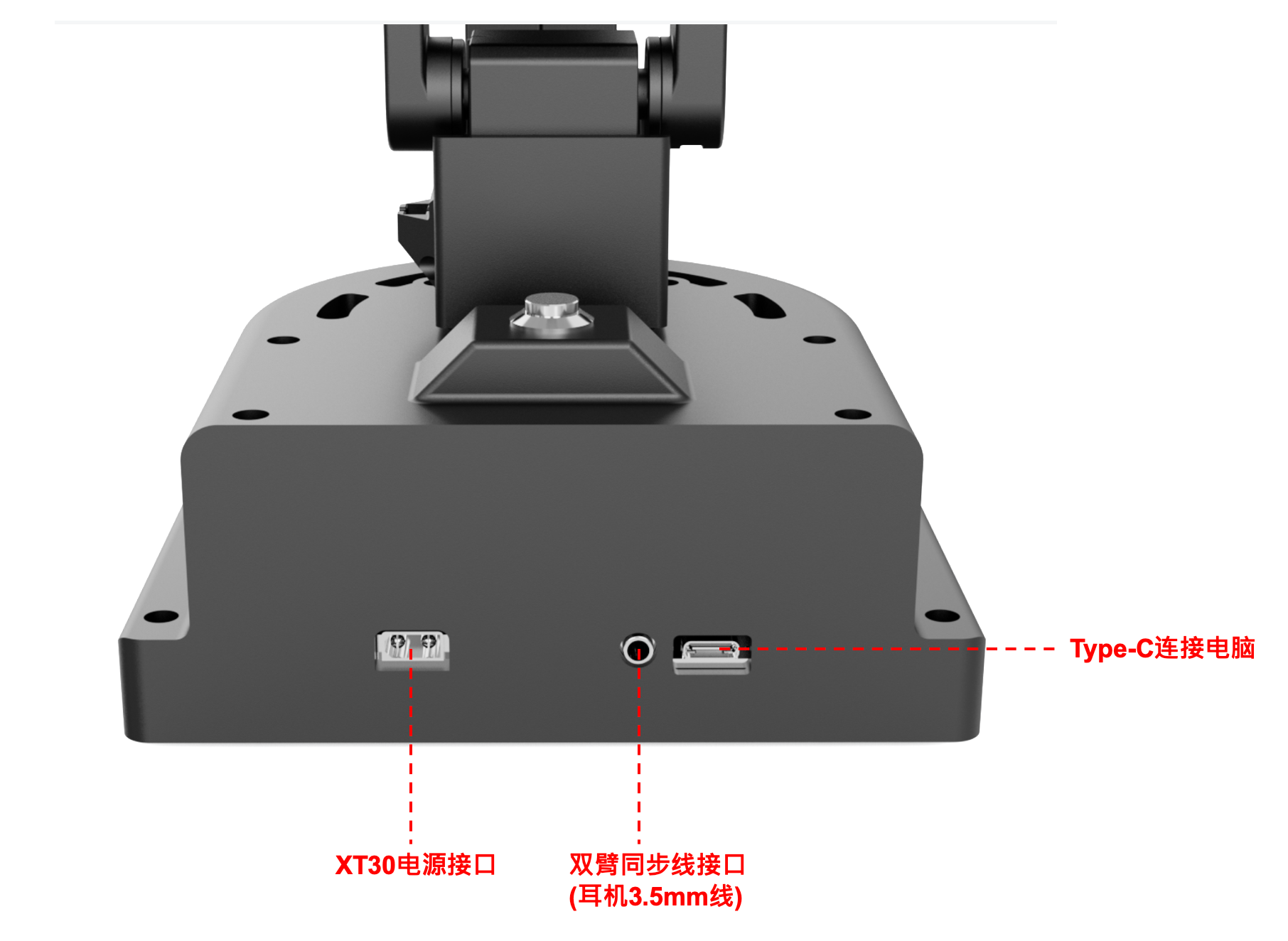
下图展示了操作臂底板的各接口说明:

下图展示了示教臂底板的各接口说明:
下图展示了示教臂握把的各按钮,其中包括:
-
遥操作同步开关按钮: 用于控制示教臂与操作臂之间的遥操作连接状态。开启时,示教臂可实时同步控制操作臂的动作;关闭时,遥操作功能断开,示教臂无法再控制操作臂;
-
姿态锁定/解除按钮: 用于切换示教臂的自由活动状态。解除锁定时,示教臂处于卸力状态,可由操作者手动引导移动;锁定时,示教臂姿态固定,无法被随意牵动;
-
夹爪开合控制扳机: 按下该扳机可控制操作臂末端夹爪的张开与闭合,实现抓取或释放操作。

2. 操作臂开箱组装教程
保持操作臂的使用姿态,并使用C型架固定于桌面边缘,等待使用。
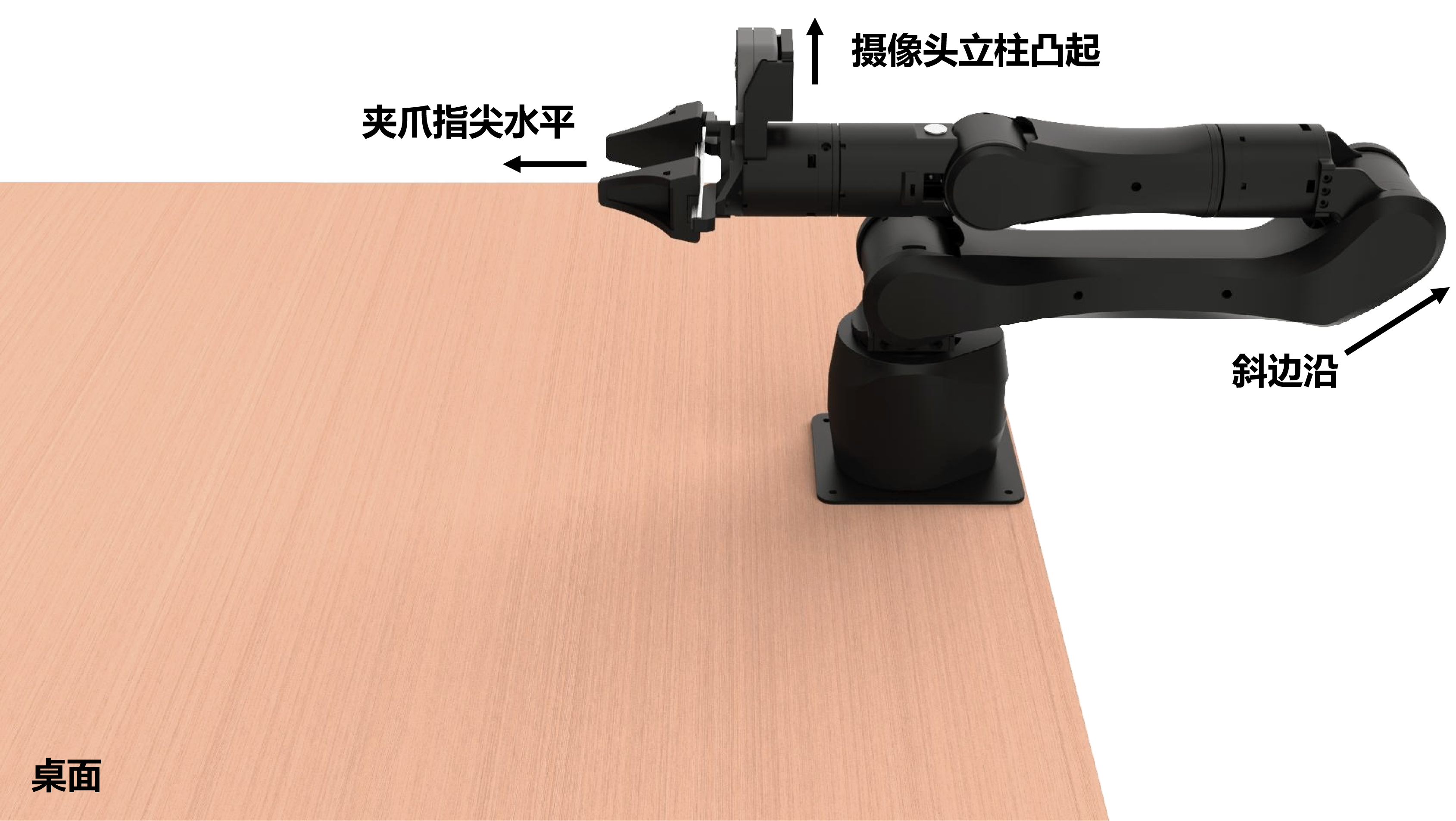
- 在每次投入使用前,操作臂必须调整至使用姿态待命,严禁在任何其他姿态下启动设备,以防造成人员伤害或产品损害;
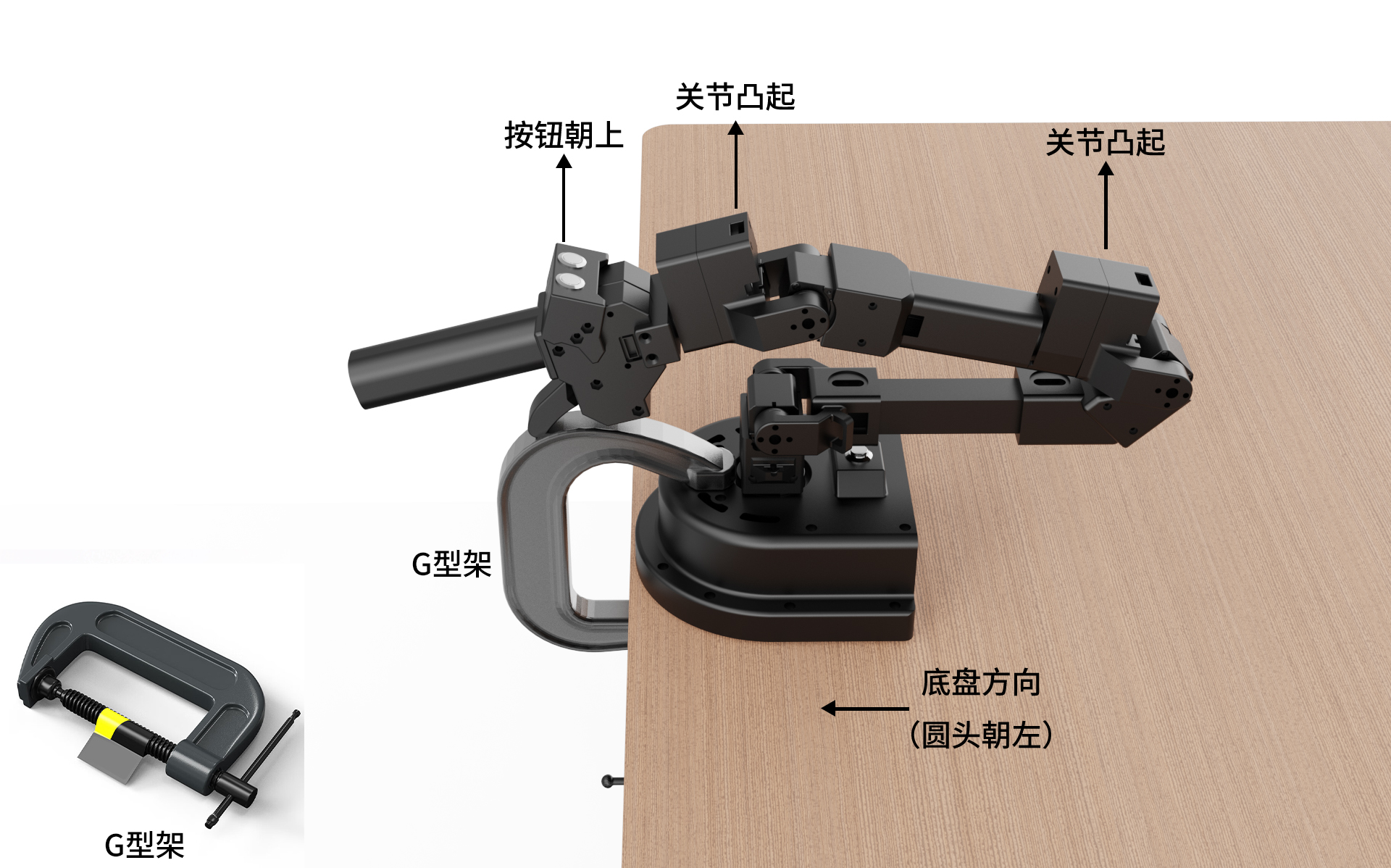
3. 示教臂开箱组装教程
将示教臂取出后平放于桌面,调整至出厂零点姿态,固定于桌面,保持待命状态。
-
在每次投入使用前,示教臂必须调整至使用姿态待命,严禁在任何其他姿态下启动设备,以防造成人员伤害或产品损害;
-
用户可通过观察两处关节的凸起方向及握把按钮的朝向进行辅助判断:在使用姿态下,关节凸起和握把按钮应均朝向斜上方,底盘圆头方向朝左,以确保机械臂已正确归位。
4. 操作臂与示教臂接线方式
目前支持两种连接方式,可根据使用场景选择。
(1) 遥操作同步线直连(无需电脑)
直接通过遥操作同步线将示教臂与操作臂相连,双臂各自接通电源后即可开始遥操作,无需连接电脑,也无需运行任何软件。
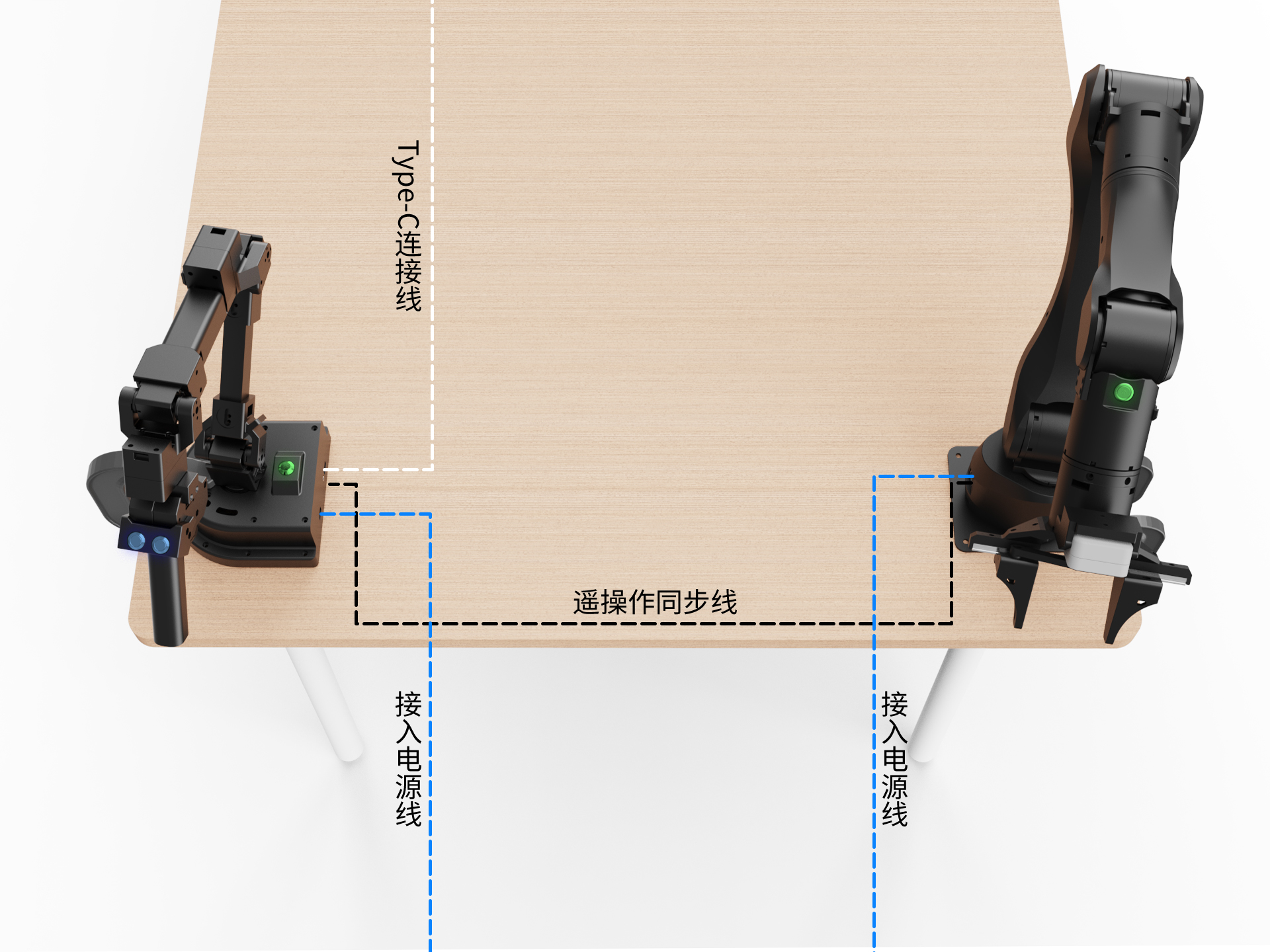
示教臂
- 将电源线接入示教臂的 DC 电源接口;
- 使用遥操作同步线,将示教臂的同步线接口与操作臂的同步线接口连接。
操作臂
- 将电源线接入操作臂的 DC 电源接口。
上电后,按下示教臂握把上的遥操作同步开关按钮即可开始遥操作。
(2) 通过电脑连接(Python SDK 控制)
将示教臂与操作臂分别通过 USB 连接到电脑,由 Python SDK 驱动遥操作,支持更丰富的参数调节与数据采集能力。
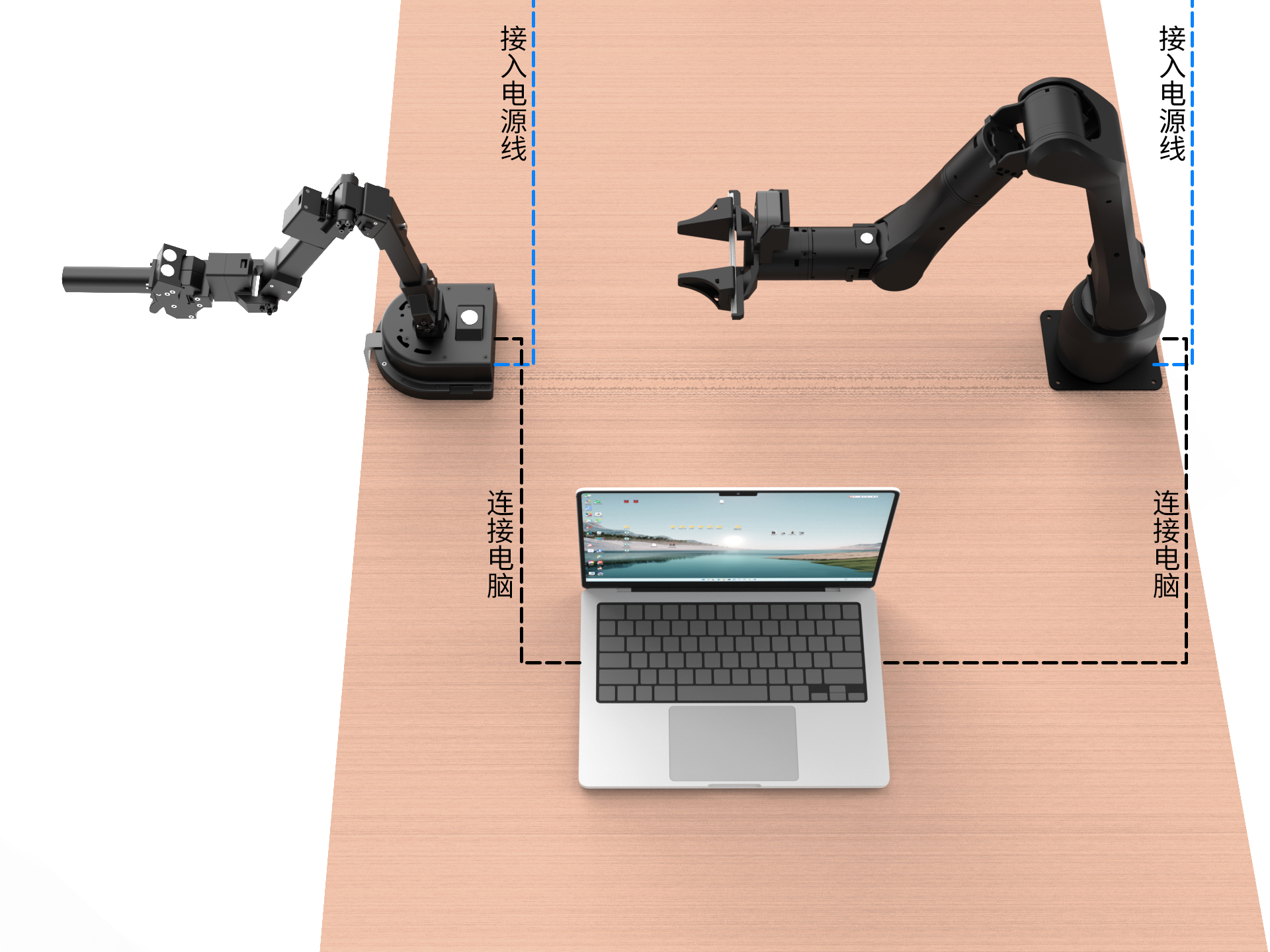
示教臂
- 将电源线接入示教臂的 DC 电源接口;
- 使用 USB 转 Type-C 数据线,将示教臂的 Type-C 接口与电脑的 USB 接口连接。
操作臂
- 将电源线接入操作臂的 DC 电源接口;
- 使用 USB 转 Type-C 数据线,将操作臂的 Type-C 接口与电脑的 USB 接口连接。
将示教臂与操作臂均连接到电脑,通过电脑进行双臂同步控制。
运行遥操作示例
运行遥操作示例前,请先完成 云擎 Python SDK(Alicia-M-SDK)的安装与环境配置。
-
打开示教臂和操作臂的电源开关;
-
设置串口权限:
sudo chmod 666 /dev/ttyACM*
- 激活 Alicia-M-SDK 的 conda 环境:
conda activate msdk
- 启动遥操作前确保云擎和灵动都处于零点位置(使用出厂设置或标准零点即可,无须额外校准示教臂零点)。
- 遥操启动前手握灵动 Alicia-DL 示教臂,可适当微微上抬,保持该姿势直到进入遥操状态。
- 若需停止遥操,请先控制云擎到零点位置附近,在终端按 Ctrl+C 终止程序。
- 确保工作空间安全,遥操过程中避免云擎碰撞。
在项目根目录运行遥操作示例(带 URDF 限位映射版本),完整参数说明参见 7.5 高级应用和设备设置:
python examples/14_demo_teleop_mapped.py --leader-port /dev/ttyACM0 --port /dev/ttyACM1 --mode mit
--leader-port:示教臂(Alicia-D)的串口,默认/dev/ttyACM0--port:操作臂(Alicia-M)的串口,默认/dev/ttyACM1--mode:控制模式,可选pv/mit(默认mit)--frequency:控制循环频率(默认 100 Hz)--speed:Follower 运动速度(0-400,映射到 0-10 rad/s,默认 400,PV/MIT 均生效)--home:启动前 Follower 先回零(默认跳过)--verbose:打印遥操作过程中的关节状态
请确保串口名与实际设备一致,可通过 ls /dev/ttyACM* 查看。
- 按 Enter 开始遥操作,拖动示教臂即可实时控制操作臂。按 Ctrl+C 停止。
5. 注意事项
-
确认机械臂各关节轴是否处于零位状态;
-
检查所有电缆连接是否牢固,绝缘外皮是否完好无损;
-
操作机械臂前,请根据实际工作环境及操作需求,佩戴必要的安全防护装备;
-
未经授权严禁擅自改装机械臂,因私自改装引发的任何故障或事故,本公司概不负责;
-
在摆放机械臂前,请务必确认其活动范围内无人员或障碍物,以防止发生碰撞或其他安全事故;
-
严禁在恶劣环境下使用本产品,包括但不限于粉尘、高温、暴晒、易燃易爆、强腐蚀、水下等场所。
-
操作时请保持低速且动作平稳,以确保设备运行的安全性与可控性;
-
操作过程中需集中注意力,提前预判机械臂的运动方向与趋势;
-
定期检查机械臂运行状态,留意是否存在异常动作或异响;
-
所有控制指令须确保机械臂运动范围限定在安全工作区域内;若发生越界情况,应立即停止操作并切断电源,以防人员受伤或设备损坏;
-
严禁在机械臂运行过程中随意断电,避免造成系统故障或意外风险;
-
操作结束后,请务必将机械臂归位至安全位置;
-
依次关闭操作臂与示教臂的电源按钮,期间请扶助机械臂,确保其在断电过程中保持平稳,防止机械冲击或损伤;
-
拔除电源插头,并妥善整理电缆;
-
将机械臂存放于干燥、常温的环境中,避免受潮、高温等因素对设备造成损害。