灵动操作臂ROS2 Humble
1. 介绍
Alicia-D ROS2 是基于 ROS 2 Humble 开发的灵动 Alicia-D 系列六轴机械臂(含夹爪)驱动与控制工具包,支持通过串口通信实现关节运动控制、夹爪操作以及实时姿态与状态读取。
![]()
![]()
1.1 主要特性
- ros2_control 集成:基于标准的 ros2_control 硬件接口,支持与 MoveIt2 无缝集成。
- MoveIt2 支持:完整的 MoveIt2 运动规划与执行功能。
- 关节控制:支持设置与读取六个关节的角度,提供平滑轨迹执行。
- 夹爪控制:支持精确位置控制,适配 50mm 和 100mm 两种夹爪类型。
- 实时状态反馈:实时获取关节角、夹爪位置与机器人状态。
- 自动固件检测:自动检测固件版本。
- 串口通信:自动搜索串口或手动指定,支持高波特率通信。
- 零位校准:将当前位置设置为新的零点。
- 扭矩开关:开启或关闭关节电机扭矩,实现自由拖动示教。
1.2 项目结构
alicia_d_driver/
├── include/alicia_d_driver/
│ ├── alicia_d_hardware_interface.hpp # 硬件接口头文件
│ └── alicia_d_driver_node.hpp # 独立驱动节点
├── src/
│ ├── alicia_d_hardware_interface.cpp # 硬件接口实现
│ ├── alicia_d_driver_node.cpp # 独立驱动
│ └── serial_communicator.cpp # 串口通信
├── launch/
│ └── alicia_d_driver.launch.py # 独立驱动启动
├── alicia_d_driver.xml # 插件描述
└── CMakeLists.txt
alicia_d_moveit/
├── config/
│ ├── alicia_d_descriptions.ros2_control.xacro # 硬件接口配置
│ ├── ros2_controllers.yaml # 控制器配置
│ ├── moveit_controllers.yaml # MoveIt 控制器映射
│ └── ... # 其他 MoveIt 配置
├── launch/
│ ├── real_robot.launch.py # 真实机械臂启动
│ ├── demo.launch.py # 仿真启动
│ └── ... # 其他启动文件
└── package.xml
alicia_d_calibration/ # 手眼标定模块
alicia_d_cube_sort/ # 2D抓取模块(物块分拣)
alicia_d_6d_grasp/ # 6D抓取模块
2. 快速开始
2.1 设置串口权限
方法1:临时设置串口权限
sudo chmod 666 /dev/ttyACM*
方法2:添加用户到dialout组(永久有效)
sudo usermod -a -G dialout $USER
注意:需要注销(Log out)再登陆,或者重启使权限生效。
2.2 获取源代码并编译
mkdir -p ~/alicia_ws/src
cd ~/alicia_ws
git clone https://github.com/Synria-Robotics/Alicia-D-ROS2.git -b v6.1.0rc1 ./src
rosdep install --from-paths src --ignore-src -r -y
colcon build
source install/setup.bash
3. 使用方法
3.1 启动 MoveIt 仿真
如果当前终端已有 ROS 2 节点在运行,请先按 Ctrl+C 终止,否则可能导致串口占用或 Topic 冲突。
进入工作空间并 source 环境(每次新建终端都需要执行):
cd ~/alicia_ws
source install/setup.bash
请核对您的夹爪类型:
如果您是 50mm 夹爪类型,可使用默认值启动:
ros2 launch alicia_d_moveit demo.launch.py
如果您是 100mm 夹爪类型,请指定夹爪类型:
ros2 launch alicia_d_moveit demo.launch.py gripper_type:=100mm
3.2 启动 MoveIt 和真实机械臂
如果当前终端已有 ROS 2 节点在运行,请先按 Ctrl+C 终止,否则可能导致串口占用或 Topic 冲突。
cd ~/alicia_ws
source install/setup.bash
使用 MoveIt 控制真实机械臂:
方法一:基本启动(使用默认参数):
ros2 launch alicia_d_moveit real_robot.launch.py
方法二:启动时指定参数:
ros2 launch alicia_d_moveit real_robot.launch.py \
gripper_type:=50mm \
port:=/dev/ttyACM0 \
speed_deg_s:=30
MoveIt Launch 参数说明
| 参数 | 默认值 | 说明 |
|---|---|---|
gripper_type | 50mm | 夹爪类型:50mm 或 100mm |
port | ''(空字符串) | 串口设备路径,如 /dev/ttyACM0,留空则自动检测 |
speed_deg_s | 20 | 关节运动的默认速度(度/秒) |
提示:底层驱动会自动检测固件版本与机械臂版本(
v5_5/v5_6),一般无需手动指定。
Rviz基础操作
- Motion Planning: 启动机械臂后会弹出Rviz窗口,鼠标拖动机械臂末端到目标位置后,点击左下方
MotionPlanning面板下的Plan,可进行运动规划;点击Execute即可执行该运动规划。 - 关节控制:在Rviz中,点击左下方
MotionPlanning面板上的Joints菜单,拖动各个关节的Value到目标值后,回到Planning菜单,可执行Plan/Execute。 - 夹爪控制:在Rviz中,展开左下方
MotionPlanning面板上的Planning Group项目,选择Gripper。点击Joints菜单,可设定夹爪开合值。回到Planning菜单,可执行Plan/Execute,观察夹爪变化。
3.3 独立驱动节点(无 MoveIt)
如果当前终端已有 ROS 2 节点在运行,请先按 Ctrl+C 终止,否则可能导致串口占用或 Topic 冲突。
cd ~/alicia_ws
source install/setup.bash
独立驱动节点仅运行底层驱动,不依赖 MoveIt,适用于只需要基础关节/夹爪控制的场景。
方法一:基本启动(使用默认参数):
ros2 launch alicia_d_driver alicia_d_driver.launch.py
方法二:启动时指定参数:
ros2 launch alicia_d_driver alicia_d_driver.launch.py \
port:=/dev/ttyACM0 \
default_speed_deg_s:=30.0
独立驱动参数说明
| 参数 | 默认值 | 说明 |
|---|---|---|
port | ''(空字符串) | 串口设备路径,如 /dev/ttyACM0。留空则自动检测 |
default_speed_deg_s | 20.0 | 关节运动的默认速度(度/秒),范围:4.39–439.45 |
独立驱动 Topics
订阅 Topics:
/joint_commands(sensor_msgs/JointState):发送关节位置和速度命令/demonstration(std_msgs/Bool):使能/禁用示教模式(零力矩)/zero_calibrate(std_msgs/Bool):执行零位校准
发布 Topics:
/joint_states(sensor_msgs/JointState):发布当前关节状态(位置、速度)
使用示例
新建终端并执行:
cd ~/alicia_ws
source install/setup.bash
1. 使能示教模式(零力矩)
ros2 topic pub --once /demonstration std_msgs/msg/Bool "{data: true}"
2. 禁用示教模式(恢复全力矩)
ros2 topic pub --once /demonstration std_msgs/msg/Bool "{data: false}"
3. 零位校准
-
先禁用力矩(进入示教模式):
ros2 topic pub --once /demonstration std_msgs/msg/Bool "{data: true}" -
将机械臂手动移动到期望的零位姿势
-
执行零位校准(校准后会自动恢复力矩):
ros2 topic pub --once /zero_calibrate std_msgs/msg/Bool "{data: true}"
4. 发送关节命令
通过 /joint_commands topic 发送关节位置和速度命令。
示例 1:移动到零位,使用默认速度(20 度/秒)
ros2 topic pub --once /joint_commands sensor_msgs/msg/JointState "
name: ['Joint1', 'Joint2', 'Joint3', 'Joint4', 'Joint5', 'Joint6', 'Gripper']
position: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 500.0]
"
示例 2:指定速度移动(30 度/秒 = 0.524 弧度/秒)
ros2 topic pub --once /joint_commands sensor_msgs/msg/JointState "
name: ['Joint1', 'Joint2', 'Joint3', 'Joint4', 'Joint5', 'Joint6', 'Gripper']
position: [0.785, 0.785, 0.0, 0.0, 0.0, 0.0, 500.0]
velocity: [0.524, 0.524, 0.524, 0.524, 0.524, 0.524, 0.0]
"
示例 3:单独控制夹爪或某个关节
ros2 topic pub --once /joint_commands sensor_msgs/msg/JointState "
name: ['Gripper']
position: [500.0]
"
ros2 topic pub --once /joint_commands sensor_msgs/msg/JointState "
name: ['Joint1']
position: [0.524]
"
单位说明:
/joint_commands topic 使用 sensor_msgs/JointState 消息类型,遵循 ROS 标准约定:
- 关节位置单位为 弧度(rad)
velocity字段中的速度单位为 弧度/秒(rad/s)
虽然驱动内部使用度/秒(
speed_deg_s/default_speed_deg_s),但 ROS 消息标准要求使用 rad/s。驱动会自动将 rad/s 转换为 deg/s,因此请始终以 rad/s 提供速度值。
行为说明:
- 如果提供了 rad/s 的速度值,驱动会将其转换为 deg/s,并使用最大值作为所有关节的公共速度
- 如果不提供速度,将使用
default_speed_deg_s参数值(单位为度/秒) - 夹爪位置范围为 0–1000(0 为完全打开,1000 为完全闭合)
速度转换参考(用于 /joint_commands topic):
- 20 度/秒 = 0.349 弧度/秒 → 使用
velocity: [0.349, 0.349, ...] - 30 度/秒 = 0.524 弧度/秒 → 使用
velocity: [0.524, 0.524, ...] - 40 度/秒 = 0.698 弧度/秒 → 使用
velocity: [0.698, 0.698, ...] - 100 度/秒 = 1.745 弧度/秒 → 使用
velocity: [1.745, 1.745, ...]
快速换算公式:弧度/秒 = 度/秒 × π / 180 或 弧度/秒 = 度/秒 × 0.0174533
5. 读取关节状态数据
ros2 topic echo /joint_states
4. 示例文件说明
4.1 基础功能
examples/ 目录包含演示脚本,用于展示如何使用 灵动操作臂ROS2 Humble 控制机械臂。
examples/
├── 01_demo_pick_and_place.py # 关节夹爪控制
├── 01_moveit_pick_and_place.py # 关节夹爪控制(MoveIt)
└── 02_demo_drag_teaching.py # 拖动示教
01_demo_pick_and_place.py
功能说明
Pick and Place 演示程序。通过直接发布关节指令 (/joint_commands) 控制机械臂,演示了从 HOME 位置移动到点 A 抓取物体,搬运到点 B 放置,最后回到 HOME 位置的完整流程。
- 程序启动,机械臂移动到HOME,夹爪张开
- 移动到A点上方,下探并闭合夹爪,上移
- 移动到HOME
- 移动到B点上方,下探并张开夹爪,上移
- 移动到HOME,程序结束
使用方式
运行前需要先启动底层的驱动节点 (注意根据实际情况选择夹爪类型 50mm 或 100mm):
ros2 launch alicia_d_driver alicia_d_driver.launch.py gripper_type:=50mm
然后在另一个终端运行此脚本 (假设在工作空间根目录下):
python3 src/examples/01_demo_pick_and_place.py
01_moveit_pick_and_place.py
功能说明
Pick and Place 演示程序。采用 MoveIt plan + execute 方式控制机械臂。调用 GetMotionPlan 服务,让规划器计算出一条包含多个中间点的完整轨迹。相比直接控制关节,具有更好的轨迹规划和平滑性。
使用方式
运行前需要先启动 MoveIt 及其相关节点 (注意根据实际情况选择夹爪类型 50mm 或 100mm):
ros2 launch alicia_d_moveit real_robot.launch.py gripper_type:=50mm
然后在另一个终端运行此脚本 (假设在工作空间根目录下):
python3 src/examples/01_moveit_pick_and_place.py
02_demo_drag_teaching.py
功能说明
Alicia D 机械臂拖动示教演示程序。
- 用户按Enter后,机械臂关闭力矩,进入示教模式
- 用户可以手动拖动机械臂,同时记录轨迹
- 用户再次按Enter,机械臂恢复力矩
- 询问用户是否回放轨迹,按Enter确认后机械臂按记录的轨迹运动
注意事项
- 关闭扭矩前请手动托住机械臂以免其突然掉落
使用方式
运行前需要先启动底层的驱动节点 (注意根据实际情况选择夹爪类型 50mm 或 100mm):
ros2 launch alicia_d_driver alicia_d_driver.launch.py gripper_type:=50mm
然后在另一个终端运行此脚本 (假设在工作空间根目录下):
python3 src/examples/02_demo_drag_teaching.py
4.2 手眼标定(外参标定)
alicia_d_calibration 是一个完整的手眼标定解决方案,用于:
- 计算机械臂末端与相机之间的空间关系
- 输出标定结果转换矩阵
- 支持各种 ArUco 标记配置
- 提供标定结果验证功能
本模块以 Intel Realsense D405 和 Orbbec Gemini 335 相机为例。如使用其它相机,可能需要修改相关文件。
alicia_d_calibration/
├── scripts/
│ ├── hand_eye_calibration.py # 手眼标定主脚本
│ ├── calibration_verifier.py # 标定验证脚本
│ └── aruco_detector.py # ArUco 标记检测器
├── launch/
│ ├── hand_eye_calibration.launch.py # 标定启动文件
│ └── verify_calibration.launch.py # 标定验证启动文件
├── config/
│ └── hand_eye_calibration_result.yaml # 标定结果输出文件
├── package.xml
├── CMakeLists.txt
└── README.md
4.2.1 环境准备
在运行标定前,确保需要的环境已经设置:
# 创建 conda 环境(如果需要)
conda create -n calib python=3.10 -y
conda activate calib
conda install pip -y
# 安装依赖
pip install "numpy<2.0.0" "opencv-python<4.11" scipy pyyaml jinja2 typeguard
若非明确指定,请尽量确保退出 conda 再运行程序:
conda deactivate
4.2.2 启动必要的节点
在不同的终端中依次启动:
终端 1:启动机械臂驱动和 MoveIt
gripper type根据实际情况修改(50/100mm)
ros2 launch alicia_d_moveit real_robot.launch.py gripper_type:=50mm
终端 2:启动相机驱动
若使用 Intel Realsense D405:
ros2 launch realsense2_camera rs_launch.py \
enable_infra1:=true \
enable_infra2:=true \
infra_rgb:=true \
pointcloud.enable:=true
若使用 Orbbec Gemini 335:
ros2 launch orbbec_camera gemini_330_series.launch.py \
enable_left_ir:=true \
enable_right_ir:=true \
enable_point_cloud:=true \
enable_colored_point_cloud:=true
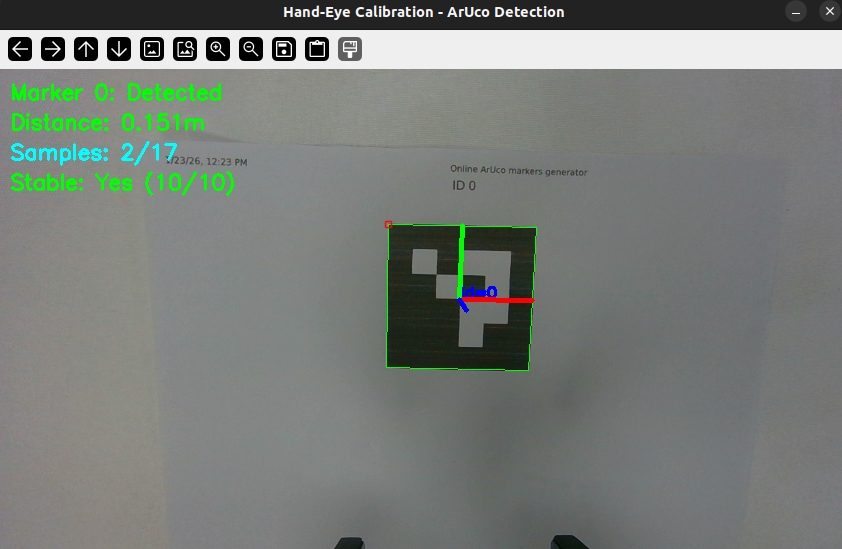
4.2.3 运行标定
请将ArUco码平放在机械臂正前方30~35cm处。
终端 3:执行标定启动文件
激活 conda 环境:
conda activate calib
执行标定启动文件(眼在手内,默认适配Realsense D405):
ros2 launch alicia_d_calibration hand_eye_calibration.launch.py \
calibration_type:=eye_in_hand
眼在手外,默认适配Realsense D405:
ros2 launch alicia_d_calibration hand_eye_calibration.launch.py \
calibration_type:=eye_to_hand
若需要让末端更低(眼在手外时标定板偏高),可调整 Joint2/Joint3 偏移量(负值会降低末端):
ros2 launch alicia_d_calibration hand_eye_calibration.launch.py \
calibration_type:=eye_to_hand \
eye_to_hand_joint2_offset:=-0.04 \
eye_to_hand_joint3_offset:=-0.06
若使用Gemini 335相机,请添加参数:
ros2 launch alicia_d_calibration hand_eye_calibration.launch.py \
camera_topic:=/camera/color/image_raw \
camera_info_topic:=/camera/color/camera_info
标定结束后,标定结果会自动保存在 alicia_d_calibration/config/hand_eye_calibration_result.yaml。
4.2.4 验证标定结果
终端 3:执行标定验证文件
若使用Realsense D405相机:
ros2 launch alicia_d_calibration verify_calibration.launch.py
若使用Gemini 335相机,请添加参数:
ros2 launch alicia_d_calibration verify_calibration.launch.py \
camera_topic:=/camera/color/image_raw \
camera_info_topic:=/camera/color/camera_info
终端 4:验证标定
查看 TF 树:
ros2 run rqt_tf_tree rqt_tf_tree --force-discover
验证标定结果:
ros2 run tf2_ros tf2_echo base_link aruco_marker_frame
若标定类型为 eye_to_hand(眼在手外,标记固定在末端),请改为:
ros2 run tf2_ros tf2_echo gripper_center aruco_marker_frame
验证脚本会输出稳定性指标(
std_t/std_r),若平移标准差在 2cm 以上或旋转标准差在 2° 以上, 通常意味着数据质量不佳(光照、遮挡、标记抖动或采样不足)。
将ArUco码放在相机视野内,验证终端中 base_link 到 aruco_marker_frame 的坐标变换。同时可在rviz中点击add添加pointcloud2,观察点云与机械臂的相对位置关系。
5. 2D抓取(眼在手上)
alicia_d_cube_sort 为 Alicia-D 机械臂提供完整的颜色识别和自动分拣功能,可以通过彩色相机检测工作区内的立方体,并按照颜色自动分拣到指定位置。
- 移动机械臂到检测位置(home)
- 等待检测节点发送检测结果
- 优先拾取绿色立方体,放置到指定位置(drop_green)
- 然后拾取蓝色立方体,放置到另一个位置(drop_blue)
- 重复上述过程直到所有立方体被分拣
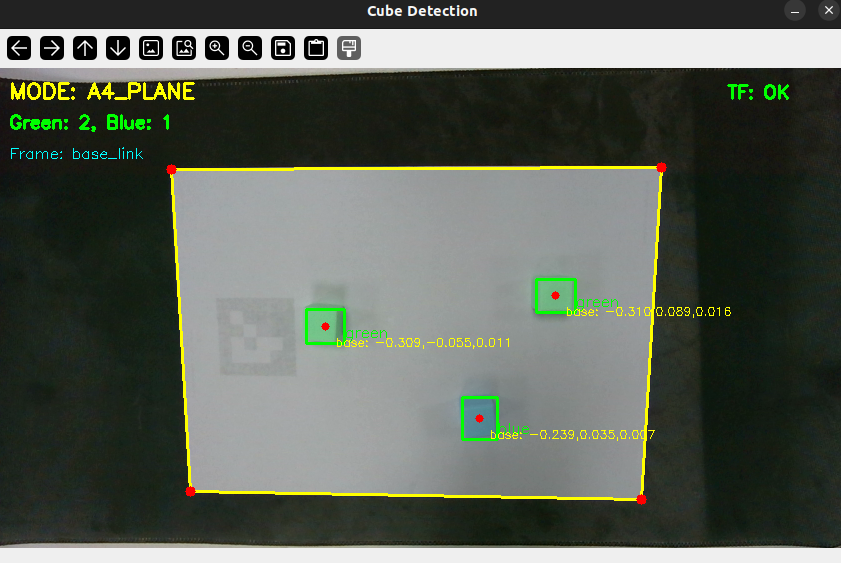
场景布置:准备一张白色A4纸,放置在与其对比度相对较高的平面上(如黑色桌布)。物块置于A4纸上,需确保机械臂检测物块时(home),相机视野覆盖整张A4纸。
本模块以 Intel Realsense D405 和 Orbbec Gemini 335 相机为例。如使用其它相机,可能需要修改相关文件。
alicia_d_cube_sort/
├── scripts/
│ ├── cube_detection.py # 立方体检测节点
│ └── cube_sorting.py # 分拣控制节点
├── launch/
│ ├── cube_detection.launch.py # 检测启动文件
│ └── cube_sorting.launch.py # 分拣启动文件
├── config/
│ └── cube_sorting.yaml # 配置文件
├── alicia_d_cube_sort/
│ ├── __init__.py # Python 包初始化
│ └── utils/ # 辅助工具模块
├── package.xml
├── CMakeLists.txt
└── README.md
5.1 配置修改
config/cube_sorting.yaml 文件定义了该模块的相关参数,您可以根据实际需求修改。
您可能需要修改机械臂抓取流程中的预定义位置:
positions:
# HOME position - Camera viewing position for cube detection - 机械臂检测物块时的关节角度(弧度制)
home:
joints: [0.0, 0.1089, 0.6703, 0.0, -1.4174, 0.0]
description: "Camera viewing position for cube detection"
# Drop zone for GREEN cubes
drop_green:
joints: [1.0, -0.0483, 0.8309, -0.0545, -1.4830, -1.3617]
description: "Position above green cube drop zone"
# Drop zone for BLUE cubes
drop_blue:
joints: [-1.0, 0.0882, 0.3399, 0.0468, -1.2804, -1.3249]
description: "Position above blue cube drop zone"
修改以下配置可调整检测模块对噪声的敏感度:
detection_confirmation:
confirm_count: 5 # Number of consecutive frames to confirm detection
distance_threshold: 0.01 # Max distance (m) to consider same cube across frames
timeout: 2.0 # Timeout (s) to forget unconfirmed detections
5.2 环境准备
在运行程序前,确保需要的环境已经设置:
# 创建 conda 环境(如果需要)
conda create -n 2d python=3.10 -y
conda activate 2d
conda install pip -y
# 安装依赖
pip install "numpy>=1.24,<2.0" scipy pyyaml opencv-python opencv-contrib-python jinja2 typeguard
若非明确指定,请尽量确保退出 conda 再运行程序:
conda deactivate
5.3 运行2D抓取模块
5.3.1 启动必要的节点
在不同的终端中依次启动:
终端 1:启动机械臂驱动和 MoveIt
gripper type根据实际情况修改(50/100mm)
ros2 launch alicia_d_moveit real_robot.launch.py gripper_type:=50mm
终端 2:启动相机驱动
若使用 Realsense D405 相机:
ros2 launch realsense2_camera rs_launch.py \
enable_infra1:=true \
enable_infra2:=true \
infra_rgb:=true \
pointcloud.enable:=true
若使用 Gemini 335 相机:
ros2 launch orbbec_camera gemini_330_series.launch.py \
enable_left_ir:=true \
enable_right_ir:=true \
enable_point_cloud:=true \
enable_colored_point_cloud:=true
5.3.2 运行检测模块
终端 3:启动检测节点
激活 conda 环境:
conda activate 2d
启动检测节点(默认适配Realsense D405):
ros2 launch alicia_d_cube_sort cube_detection.launch.py
若使用 Gemini 335 相机,请添加参数:
ros2 launch alicia_d_cube_sort cube_detection.launch.py \
camera_topic:=/camera/color/image_raw \
camera_info_topic:=/camera/color/camera_info
请确保在抓取识别时,物体下方铺有一张完整可被相机识别的A4白纸(如图中黄色区域所示):
5.3.3 运行分拣模块
终端 4:启动分拣节点
请确保退出 conda 环境,启动分拣节点:
ros2 launch alicia_d_cube_sort cube_sorting.launch.py
启动后,机械臂将先运动到检测位置(HOME position),等待检测节点发送检测结果,然后抓取并分拣立方体。
6. 6D抓取(眼在手上)
alicia_d_6d_grasp 为 Alicia-D 机械臂提供完整的 6D 抓取功能,结合深度相机和抓取算法(GraspGen),实现对任意姿态物体的抓取。
本模块目前仅支持 Intel Realsense D405(推荐)和 Orbbec Gemini 335 相机。
在本代码中,若使用 D405 则将支持彩色点云。使用Gemini 335 相机则暂不支持彩色点云,但不影响抓取效果。
如需使用其它相机,需要自行更改相关代码。
6.1 源码安装与环境准备
本小节转载并改编自官方文档 [GraspGen] [FoundationStereo] [SAM2],可能落后于官方文档,强烈建议与官方文档对照阅读。
如遇到问题,可寻求AI辅助。
6.1.1 GraspGen 安装
# 环境准备
conda create -n GraspGen python=3.10 -y && conda activate GraspGen
pip install torch==2.1.0 torchvision==0.16.0 torch-cluster torch-scatter -f https://data.pyg.org/whl/torch-2.1.0+cu121.html
cd ~/alicia_ws/src/alicia_d_grasp_6d/Models
# 克隆仓库并安装
git clone https://github.com/NVlabs/GraspGen.git
cd GraspGen && pip install -e .
# 安装CUDA
conda install -c "nvidia/label/cuda-12.1.0" cuda-toolkit
# 安装 PointNet 依赖
./install_pointnet.sh
下载Checkpoints:
cd ~/alicia_ws/src/alicia_d_grasp_6d/Models/GraspGen
git clone https://huggingface.co/adithyamurali/GraspGenModels
sudo apt update
sudo apt install git-lfs
git lfs install
cd GraspGenModels
git lfs pull
如果您尚未安装NVDIA显卡驱动:
sudo apt update
sudo apt install nvidia-driver-535
# 安装后必须重启电脑才能生效
安装和启动 meshcat-server:
conda activate GraspGen
pip install meshcat
meshcat-server
新建终端,运行推理:
conda activate GraspGen
cd ~/alicia_ws/src/alicia_d_grasp_6d/Models/GraspGen
python scripts/demo_object_pc.py --sample_data_dir GraspGenModels/sample_data/real_object_pc --gripper_config GraspGenModels/checkpoints/graspgen_robotiq_2f_140.yml
在浏览器中打开输出的链接,当 meshcat-server 中能够成功生成物体点云和抓取位姿,则该模块环境配置成功。
6.1.2 FoundationStereo 安装
cd ~/alicia_ws/src/alicia_d_grasp_6d/Models
git clone https://github.com/NVlabs/FoundationStereo.git
环境准备:
cd FoundationStereo
conda env create -f environment.yml
conda activate foundation_stereo
conda install -c "nvidia/label/cuda-12.1.0" cuda-toolkit
pip install flash-attn --no-build-isolation
下载官方权重并保存到 FoundationStereo/pretrained_models/ 文件夹下。
运行推理:
cd ~/alicia_ws/src/alicia_d_grasp_6d/Models/FoundationStereo
python scripts/run_demo.py --left_file ./assets/left.png --right_file ./assets/right.png --ckpt_dir ./pretrained_models/11-33-40/model_best_bp2.pth --out_dir ./test_outputs/
若生成并弹出点云图,则该模块环境配置成功。
6.1.3 SAM2 安装
在 alicia_d_grasp_6d/Models/ 目录下:
cd ~/alicia_ws/src/alicia_d_grasp_6d/Models
conda create -n sam2 python=3.10 && conda activate sam2
git clone https://github.com/facebookresearch/sam2.git && cd sam2
pip install -e .
pip install -e ".[notebooks]"
打开 sam2/checkpoints/download_ckpts.sh ,将SAM 2 checkpoints的部分取消注释,可注释掉SAM 2.1 checkpoints:
#!/bin/bash
# Copyright (c) Meta Platforms, Inc. and affiliates.
# All rights reserved.
# This source code is licensed under the license found in the
# LICENSE file in the root directory of this source tree.
# Use either wget or curl to download the checkpoints
if command -v wget &> /dev/null; then
CMD="wget"
elif command -v curl &> /dev/null; then
CMD="curl -L -O"
else
echo "Please install wget or curl to download the checkpoints."
exit 1
fi
# Define the URLs for SAM 2 checkpoints
SAM2_BASE_URL="https://dl.fbaipublicfiles.com/segment_anything_2/072824"
sam2_hiera_t_url="${SAM2_BASE_URL}/sam2_hiera_tiny.pt"
sam2_hiera_s_url="${SAM2_BASE_URL}/sam2_hiera_small.pt"
sam2_hiera_b_plus_url="${SAM2_BASE_URL}/sam2_hiera_base_plus.pt"
sam2_hiera_l_url="${SAM2_BASE_URL}/sam2_hiera_large.pt"
# Download each of the four checkpoints using wget
echo "Downloading sam2_hiera_tiny.pt checkpoint..."
$CMD $sam2_hiera_t_url || { echo "Failed to download checkpoint from $sam2_hiera_t_url"; exit 1; }
echo "Downloading sam2_hiera_small.pt checkpoint..."
$CMD $sam2_hiera_s_url || { echo "Failed to download checkpoint from $sam2_hiera_s_url"; exit 1; }
echo "Downloading sam2_hiera_base_plus.pt checkpoint..."
$CMD $sam2_hiera_b_plus_url || { echo "Failed to download checkpoint from $sam2_hiera_b_plus_url"; exit 1; }
echo "Downloading sam2_hiera_large.pt checkpoint..."
$CMD $sam2_hiera_l_url || { echo "Failed to download checkpoint from $sam2_hiera_l_url"; exit 1; }
# Define the URLs for SAM 2.1 checkpoints
# SAM2p1_BASE_URL="https://dl.fbaipublicfiles.com/segment_anything_2/092824"
# sam2p1_hiera_t_url="${SAM2p1_BASE_URL}/sam2.1_hiera_tiny.pt"
# sam2p1_hiera_s_url="${SAM2p1_BASE_URL}/sam2.1_hiera_small.pt"
# sam2p1_hiera_b_plus_url="${SAM2p1_BASE_URL}/sam2.1_hiera_base_plus.pt"
# sam2p1_hiera_l_url="${SAM2p1_BASE_URL}/sam2.1_hiera_large.pt"
# SAM 2.1 checkpoints
# echo "Downloading sam2.1_hiera_tiny.pt checkpoint..."
# $CMD $sam2p1_hiera_t_url || { echo "Failed to download checkpoint from $sam2p1_hiera_t_url"; exit 1; }
# echo "Downloading sam2.1_hiera_small.pt checkpoint..."
# $CMD $sam2p1_hiera_s_url || { echo "Failed to download checkpoint from $sam2p1_hiera_s_url"; exit 1; }
# echo "Downloading sam2.1_hiera_base_plus.pt checkpoint..."
# $CMD $sam2p1_hiera_b_plus_url || { echo "Failed to download checkpoint from $sam2p1_hiera_b_plus_url"; exit 1; }
# echo "Downloading sam2.1_hiera_large.pt checkpoint..."
# $CMD $sam2p1_hiera_l_url || { echo "Failed to download checkpoint from $sam2p1_hiera_l_url"; exit 1; }
echo "All checkpoints are downloaded successfully."
下载官方权重:
cd checkpoints && \
./download_ckpts.sh && \
cd ..
6.2 运行6D抓取模块
- 启动机械臂和相机;
- 启动 ROS 桥接节点和 MeshCat 可视化服务器;
- 启动抓取执行节点,等待机械臂移动到观察位置;
- 启动深度估计节点(FoundationStereo)和目标分割节点(SAM2)。无顺序要求,可同时启动;
- 在SAM2图像窗口选择目标物体后,启动抓取位姿生成节点(GraspGen);
- 在终端交互中选择是否执行抓取,当前的抓取的位姿将在meshcat中显示;
- 机械臂执行抓取动作,完成后回到观察位置;
- (可选)在SAM2图像窗口选择新物体,然后在运行GraspGen节点的终端中按
Enter,基于新的点云和掩码生成新的抓取位姿,重复步骤6-8直至完成任务。
6.2.1 启动机械臂和相机
启动机械臂驱动和 MoveIt(夹爪类型根据实际情况修改):
ros2 launch alicia_d_moveit real_robot.launch.py gripper_type:=50mm
若使用 Realsense D405 相机(推荐):
ros2 launch realsense2_camera rs_launch.py \
enable_infra1:=true \
enable_infra2:=true \
infra_rgb:=true \
pointcloud.enable:=true
若使用 Gemini 335 相机:
ros2 launch orbbec_camera gemini_330_series.launch.py \
enable_left_ir:=true \
enable_right_ir:=true \
enable_point_cloud:=true \
enable_colored_point_cloud:=true
以下内容均以 Intel Realsense D405 相机为例。若使用 Orbbec Gemini 335 相机,请相应修改文件路径和文件名。
6.2.2 启动 ROS 桥接节点
# 系统 Python 环境
python3 d405_ros_bridge.py
6.2.3 启动 MeshCat 可视化服务器
# graspgen 环境
conda activate GraspGen
meshcat-server
请在浏览器中打开输出链接。
6.2.4 启动抓取执行节点
# 系统 Python 环境(退出conda)
python3 d405_execution.py
该节点负责监听抓取位姿话题,并调用 MoveIt 执行抓取动作。
启动该节点后,机械臂会张开夹爪,并移动到预设的观察位置,等待抓取位姿。当GraspGen节点生成抓取位姿后,当前抓取位姿会在 MeshCat 中红色高亮显示,终端会提示用户是否执行当前抓取。
交互操作:
y:执行当前抓取n:跳过,查看下一个q:退出
在待选的抓取位姿中,具有以下特征的抓取位姿将被优先处理:
- 抓取方向接近竖直向下
- 较高的 confidence (由 GraspGen 评估的分数)
- 较短的关节路径距离(基于当前机械臂位姿计算)
故靠前的抓取位姿通常具有较高的质量和IK求解成功率。如发现靠前的大量位姿IK求解失败,可尝试调整 d405_execution.py 中的抓取相关参数:
GRIPPER_DEPTH:夹爪深度PRE_GRASP_DISTANCE:预抓取距离min_z:抓取位姿 z 轴最小值,低于该值的位姿将被提前过滤
请等待机械臂移动到观察位置后,再启动后续节点。
6.2.5 启动深度估计节点(FoundationStereo)
# foundation_stereo 环境
conda activate foundation_stereo
python d405_foundationstereo.py --visualize
参数:
--visualize: 显示深度图(仅在第一次推理后显示,按q退出)--ckpt_dir: 模型权重路径--scale: 图像缩放比例--z_far: 最大深度--denoise_cloud: 启用点云去噪(默认开启)
q 退出图片,方可发布点云话题。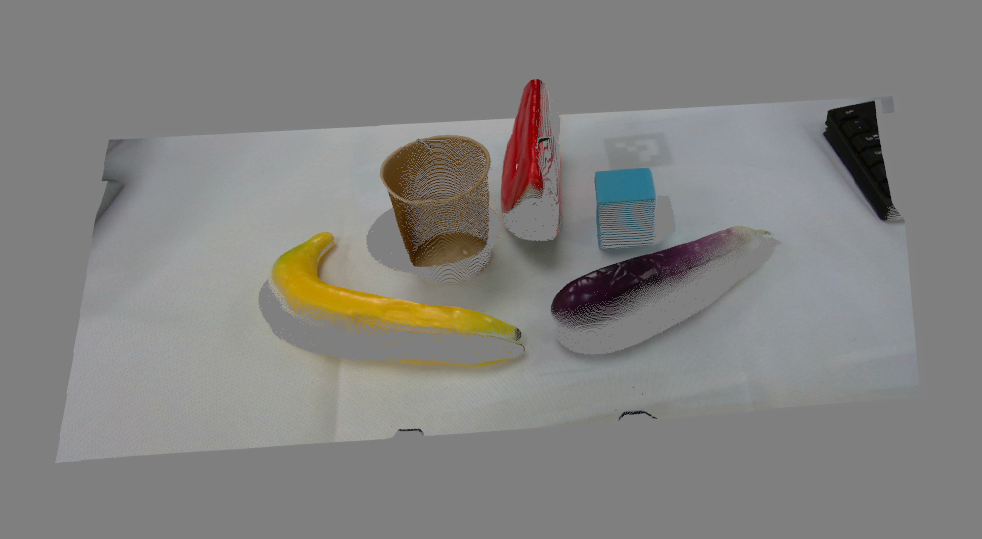
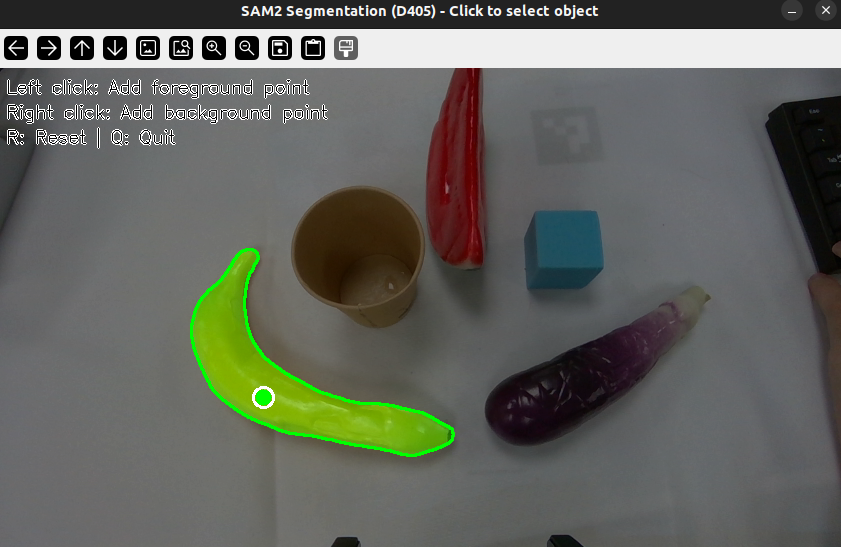
6.2.6 启动目标分割节点(SAM2)
# SAM2 环境
conda activate sam2
python d405_sam2.py
启动该节点后,会弹出一个窗口,实时显示彩色图像。用户可以通过鼠标点击图像来添加正样本点(目标区域)和负样本点(背景区域),以引导SAM2模型生成目标物体的掩码。
参数:
--model: 模型大小 [tiny/small/base/large](默认 large)--bridge_port: ZeroMQ 端口
交互操作:
- 左键点击:添加正样本点(目标区域)
- 右键点击:添加负样本点(背景区域)
r键:重置q:退出
6.2.7 启动抓取位姿生成节点(GraspGen)
# GraspGen 环境
conda activate GraspGen
python d405_graspgen.py
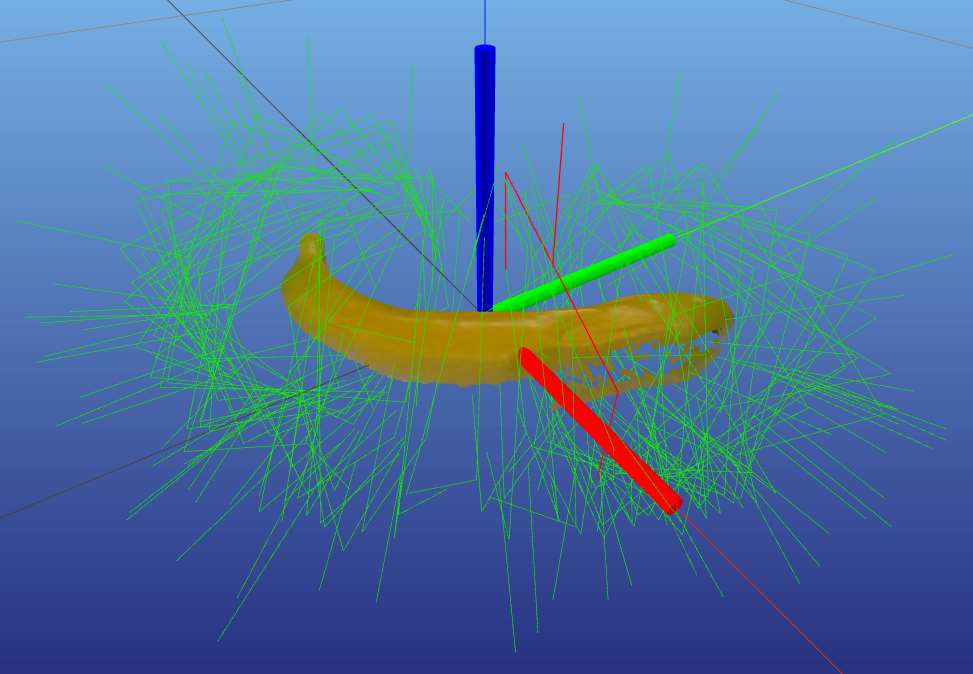
该节点订阅点云和掩码话题,使用 GraspGen 模型生成抓取位姿,并发布到抓取执行节点。您可以在 meshcat-server 界面中查看生成的抓取位姿,当前的抓取位姿会以红色高亮显示。您可以在运行抓取执行节点的终端中选择是否执行当前抓取。
当机械臂完成抓取并回到观察位置后,可在SAM2窗口中选择新的目标物体,然后在GraspGen终端中按 Enter,此时GraspGen将基于新的点云和掩码生成新的抓取位姿。
参数:
--gripper_config: 夹爪配置文件--grasp_threshold: 置信度阈值(默认 0.8)--num_grasps: 生成抓取数量(默认 200)--topk_num_grasps: 返回 top-k 抓取(默认 100)
meshcat-server 中,物块点云在机械臂基座坐标系下,并做了居中处理。